 LinuxCNC/EMC2를 이용하여 스태핑모터 돌리기 설정^^
2012. 9. 5. 16:46
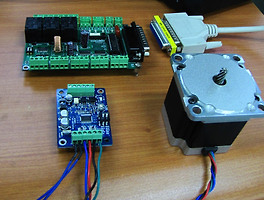
요즘 참으로 정신이 없습니다. 진득하니 뭔가 하나를 끝내야하는데, A라는 일을 하다가, 갑자기 B하다가, C하다가, 다시 A로 돌아와서 일하다가... 뭐 이러다보니, 시간의 효율성이 무쟈게 떨어지네요. 아무튼, 요즘 또 하나의 공부하는 꼭지로, 리눅스를 건드려보고 있습니다. 일명 LinuxCNC.본래, 가공 데이터가 공작기계쪽으로 넘어가게되면, G-code로 변환되어 넘어갑니다. 이를 Mach3같은 PC프로그램에서 해석해서 공작기계쪽에 지령을 내리게 되죠. 공작기계쪽은 인터페이스보드가 이 지령을 받아, 다수의 축이 있는 공작기계의 모터의 직접 명령을 가하게 됩니다.일반적으로 CNC같은 공작기계는 스탭모터를 많이 사용하구요. 그런데, MS-Window기반의 이런 프로그램은 인터넷 문서들의 리포팅을 받아보면..
LinuxCNC/EMC2를 이용하여 스태핑모터 돌리기 설정^^
2012. 9. 5. 16:46
요즘 참으로 정신이 없습니다. 진득하니 뭔가 하나를 끝내야하는데, A라는 일을 하다가, 갑자기 B하다가, C하다가, 다시 A로 돌아와서 일하다가... 뭐 이러다보니, 시간의 효율성이 무쟈게 떨어지네요. 아무튼, 요즘 또 하나의 공부하는 꼭지로, 리눅스를 건드려보고 있습니다. 일명 LinuxCNC.본래, 가공 데이터가 공작기계쪽으로 넘어가게되면, G-code로 변환되어 넘어갑니다. 이를 Mach3같은 PC프로그램에서 해석해서 공작기계쪽에 지령을 내리게 되죠. 공작기계쪽은 인터페이스보드가 이 지령을 받아, 다수의 축이 있는 공작기계의 모터의 직접 명령을 가하게 됩니다.일반적으로 CNC같은 공작기계는 스탭모터를 많이 사용하구요. 그런데, MS-Window기반의 이런 프로그램은 인터넷 문서들의 리포팅을 받아보면..
 쿼드콥터의 세계 1위 연구실. 펜실베니아 대학 GRASP 연구실
2012. 6. 16. 12:15
제가 석사 2년차 박사 1년차때쯤... (휴~ 벌써 10년이나 전 이야기네요.ㅠㅠ) 쿼드콥터에 관심을 가지게 됩니다.[관련글] 블로그 포스팅에서는 2009년입니다만,.^^. 그리고, 이 쿼드콥터의 이론적 제어기법에 대한 이야기들을 잠시했습니다.[관련글1, 관련글2, 관련글3, 관련글4] 당연히 동역학적 면에서 시작해서 시뮬레이션 단계의 제아기가 적용되었으니, 실제로 만들었어야하는데요. 문제는... 못만들었습니다.ㅠㅠ. 당시엔 어떻게 실제로 만들어야하는지를 몰랐거든요.ㅠㅠ. 그렇게 어떻게 실제로 만드는지를 가지고, 꽤 많은 시간을 보냈습니다.실제로는 몇번 만들었습니다만, 잘 되지 않았습니다. 그러다가 문제점이 무엇인가를 고민고민하다가, 다시 시작한 것이, 각도추정이었습니다. 알고봤더니 저희가 쿼드콥터의 자..
쿼드콥터의 세계 1위 연구실. 펜실베니아 대학 GRASP 연구실
2012. 6. 16. 12:15
제가 석사 2년차 박사 1년차때쯤... (휴~ 벌써 10년이나 전 이야기네요.ㅠㅠ) 쿼드콥터에 관심을 가지게 됩니다.[관련글] 블로그 포스팅에서는 2009년입니다만,.^^. 그리고, 이 쿼드콥터의 이론적 제어기법에 대한 이야기들을 잠시했습니다.[관련글1, 관련글2, 관련글3, 관련글4] 당연히 동역학적 면에서 시작해서 시뮬레이션 단계의 제아기가 적용되었으니, 실제로 만들었어야하는데요. 문제는... 못만들었습니다.ㅠㅠ. 당시엔 어떻게 실제로 만들어야하는지를 몰랐거든요.ㅠㅠ. 그렇게 어떻게 실제로 만드는지를 가지고, 꽤 많은 시간을 보냈습니다.실제로는 몇번 만들었습니다만, 잘 되지 않았습니다. 그러다가 문제점이 무엇인가를 고민고민하다가, 다시 시작한 것이, 각도추정이었습니다. 알고봤더니 저희가 쿼드콥터의 자..







