본 내용은 제 평상시 저의 ROS 스승님으로 생각하고 있는 ahnbk.com님의 도움을 매우~ 받았습니다.^^. 지난번에 Noetic을 설치하는 과정을 이야기했는데요. 그리고 catkin tools를 이번에는 설치하기 어렵다고 생각했는데 아니었습니다. 그 과정을 짧지만 정리해 둡니다.

요즘 유투브에 동영상을 올릴때 사용하는 첫화면인데.. 아직까지는 마음에 듭니다.^^

넵. 지난번 Noetic 설치에서 이어지는 내용입니다.
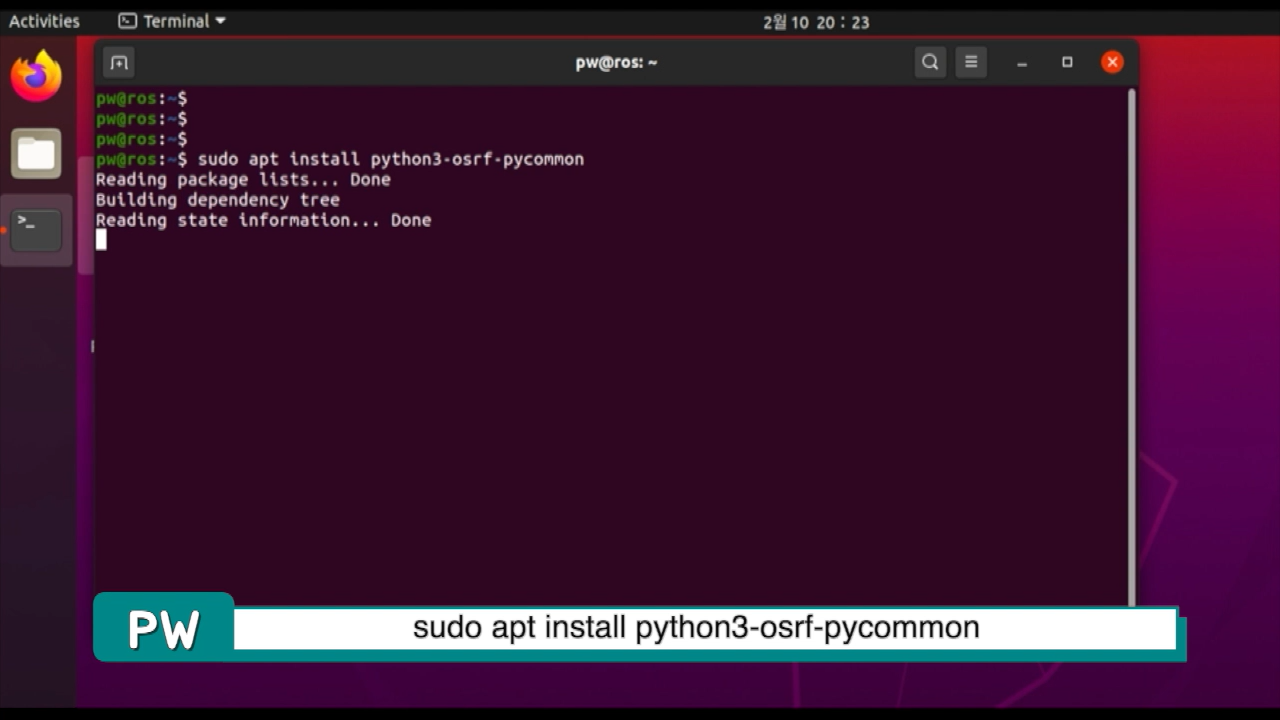
먼저 sudo apt install python3-osrf-pycommon을 설치합니다.

그리고 sudo apt insall python3-catkin-tools를 설치합니다. 음.. 이게 끝입니다.^^
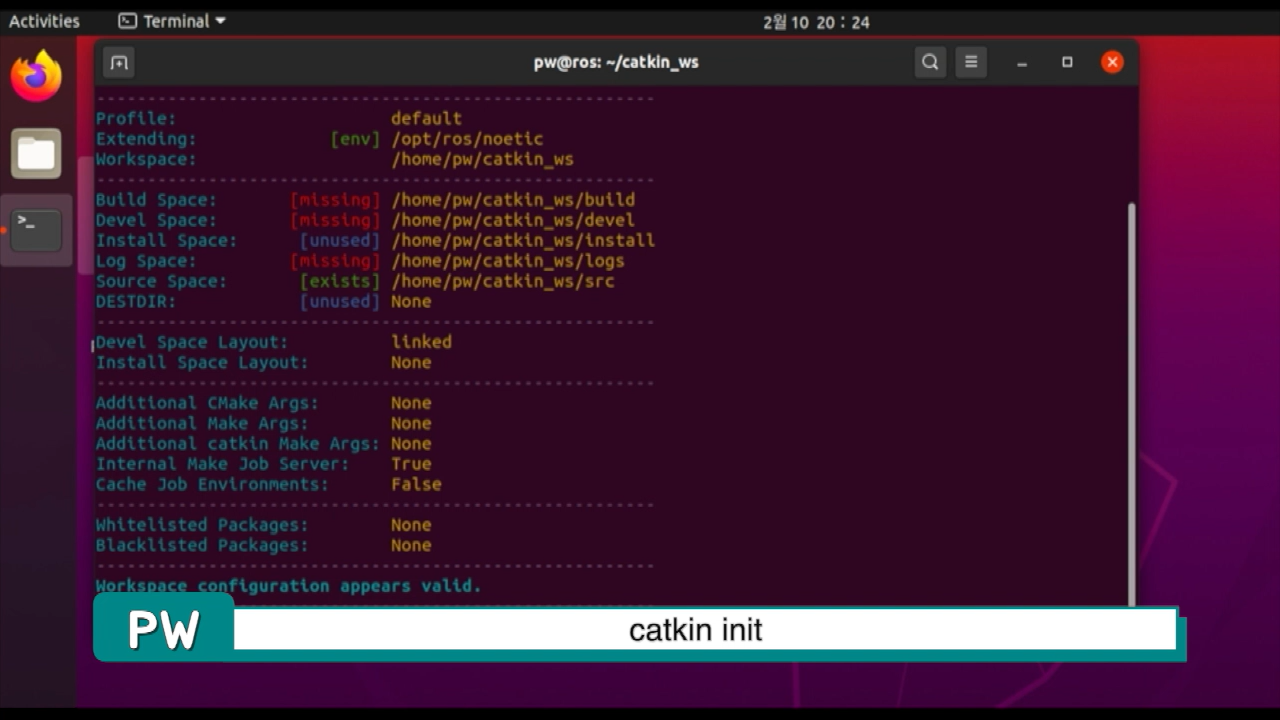
이제 워크 스페이스에서 catkin init을 하고

아무런 소스코드가 없어서 그냥 워크스페이스 폴더에서 catkin build를 수행해줍니다.
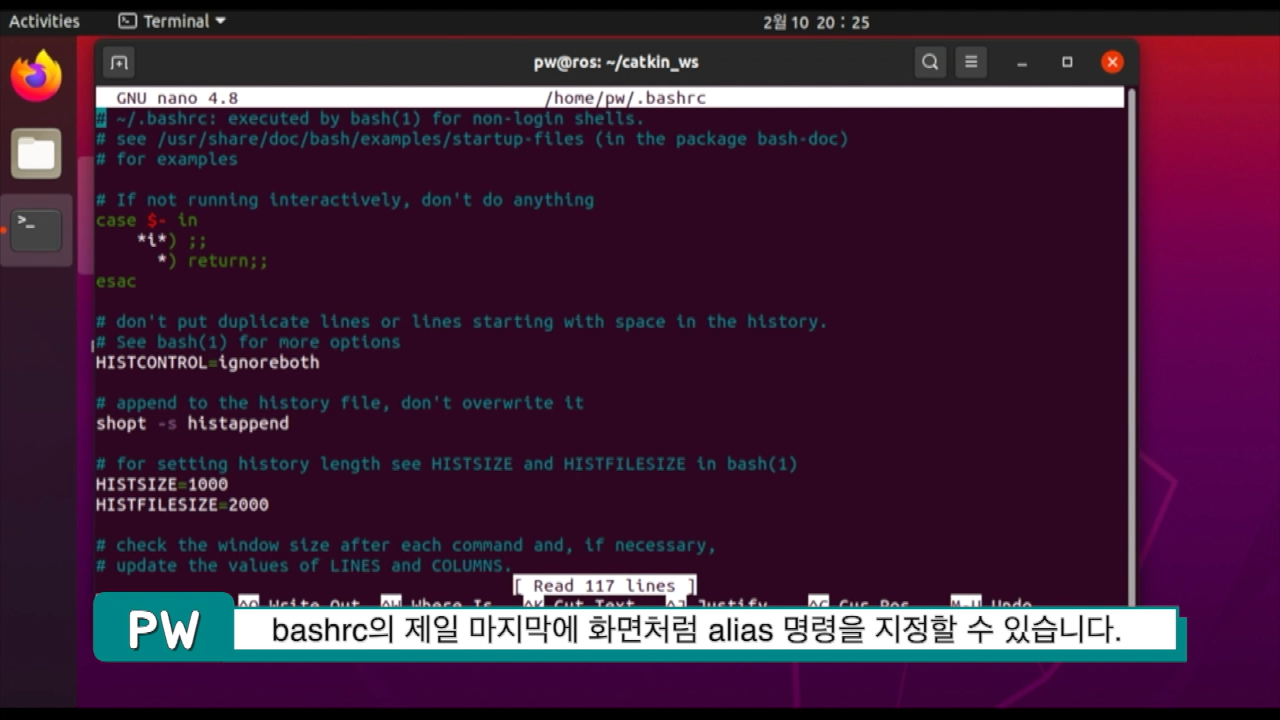
이제 nano ~/.bashrc를 통해 bashrc를 열어서 제일 마지막으로 가서 alias를 하나 지정할 겁니다. 이유는 우분투 20.04 부터는 아마도 ROS 유저들은 noetic과 함께 foxy를 사용하게 될텐데 한 터미널에서 ROS1과 2를 모두 설정할 수 없어서 각각 지정해야하거든요.
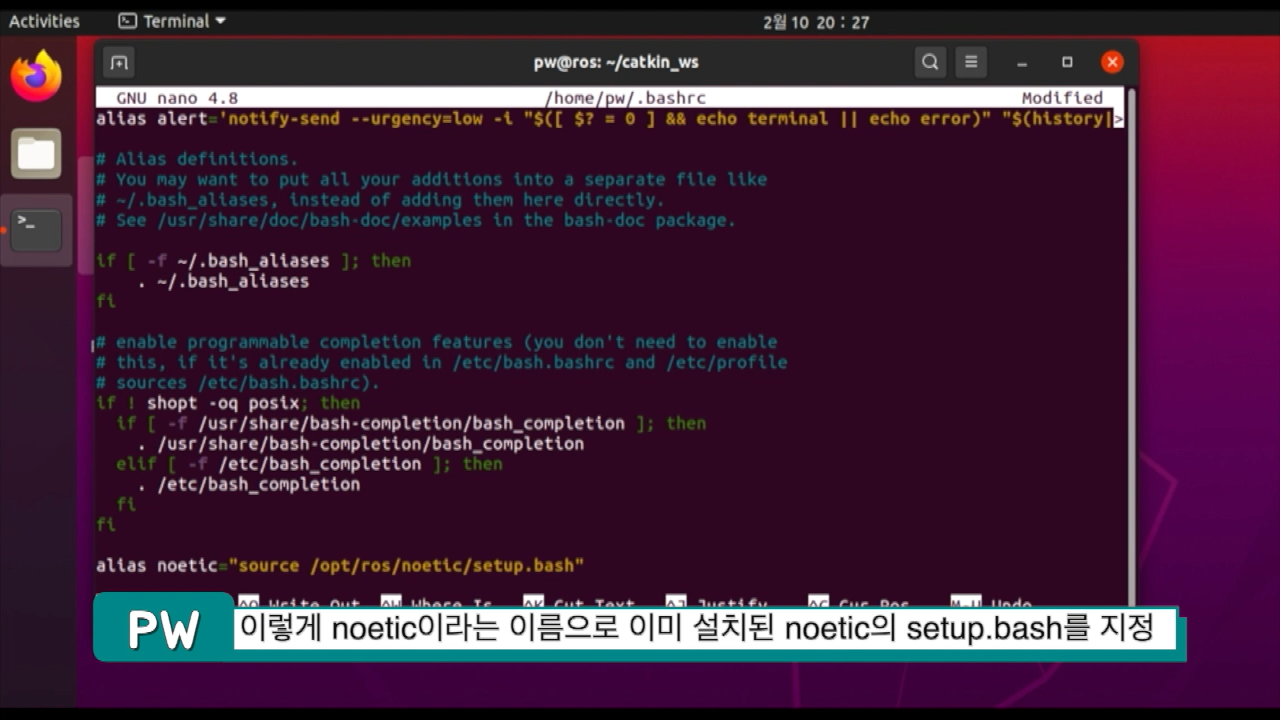
그래서 이렇게 setup.bash를 지정해둡니다. 이렇게 하면 noetic만 부르면 되죠.
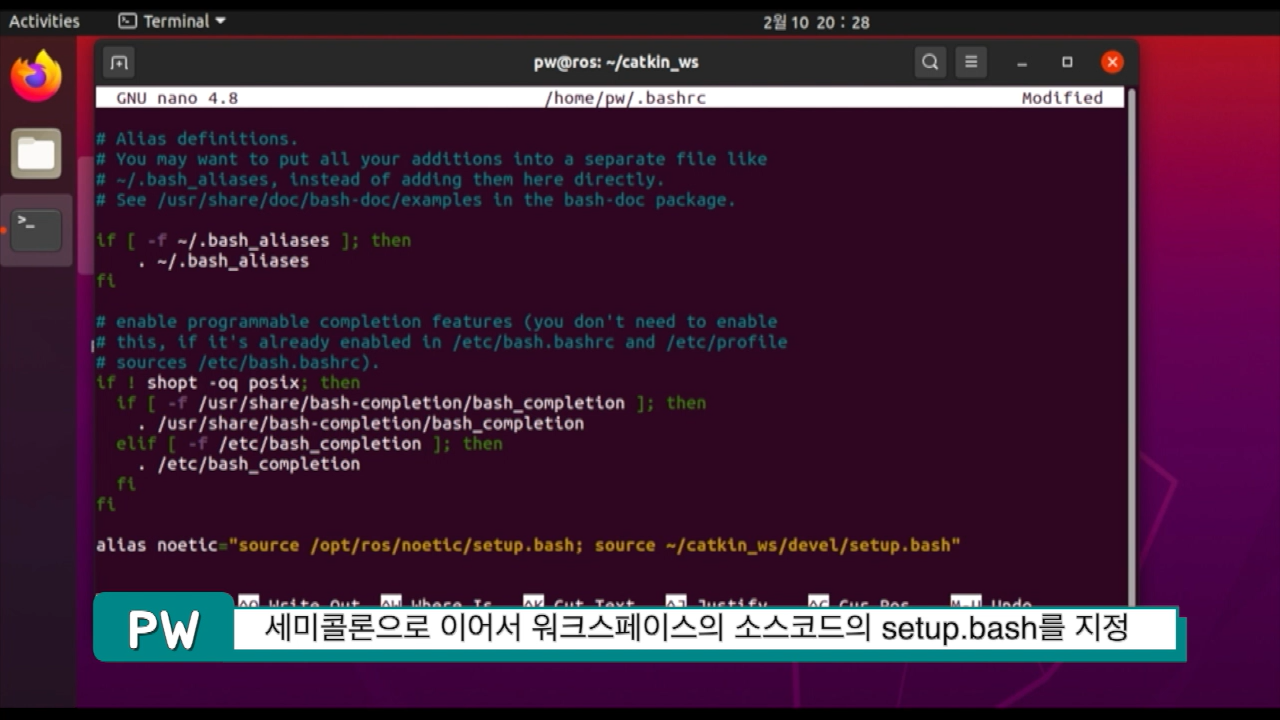
자신의 워크스페이스에서의 setup.bash도 부르고 싶으면 세미콜론으로 구별해보는게 제일 간단할 것 같네요.

그냥 해두면 음... 조금 친절한 명령이 되기 위해 echo 명령으로 메세지 한 줄 넣어 주는 것도 alias에 포함시키죠.
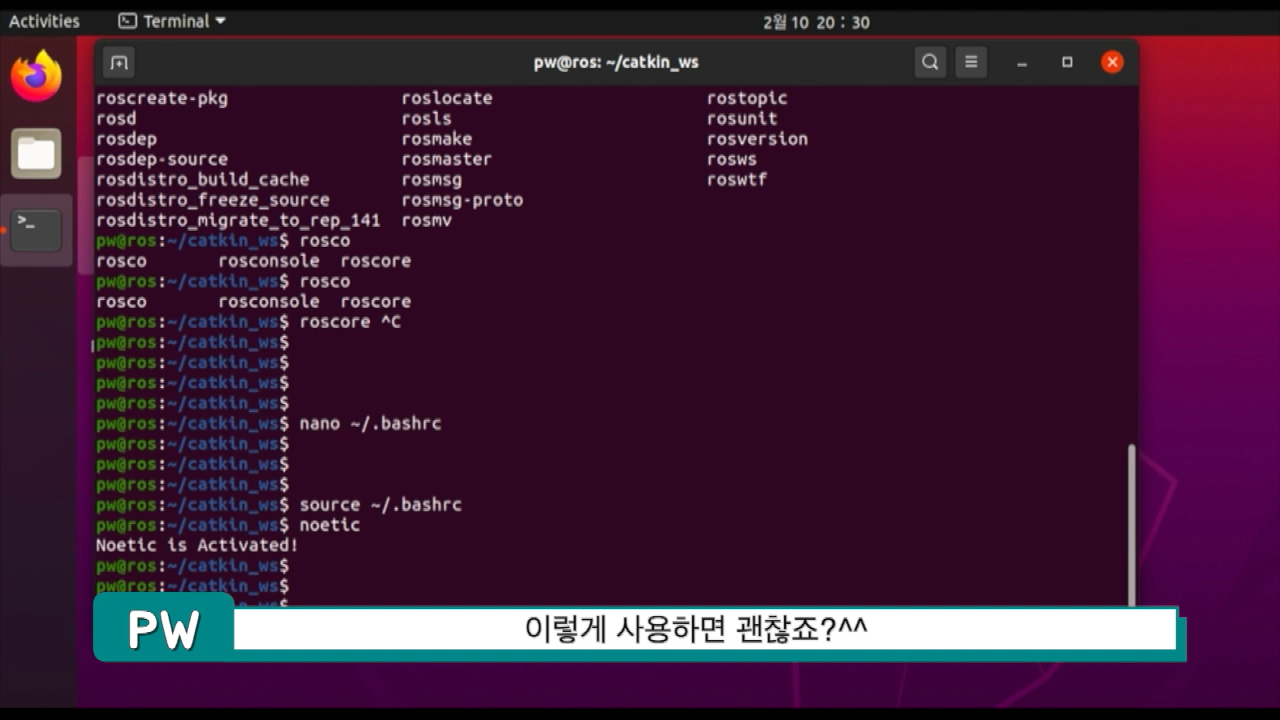
그리고 noetic이라고 명령만 호출하면 됩니다. 대충 noe까지 치고 탭키를 입력하면 됩니다.
'Robot > Robot Program - ROS' 카테고리의 다른 글
| ROS 토픽을 터미널에서 그래픽하게 보여주는 rosshow (2) | 2021.03.21 |
|---|---|
| ROS에서 odom 정보를 기초로 로봇에 위치 명령 인가하기 (10) | 2021.03.14 |
| Ubuntu 20.04에서 ROS1 Noetic과 ROS2 Foxy 같이 설치하기 (12) | 2021.02.22 |
| SSH로 접근할때 remote identification 에러 대응 (2) | 2021.02.01 |
| 라즈베리파이의 라즈비안에 ROS melodic 버전에서 YDLIDAR 설치하기 (6) | 2021.01.29 |
| ROS Noetic 우분투 20.04에 설치해보기 (10) | 2021.01.20 |
| 라즈베리파이 OS인 라즈비안에서 ROS melodic 패키지 추가하기 (4) | 2021.01.13 |



