URDF를 가지고 로봇의 좌표계를 해석하는.... 그러니까 그냥 ROS2로 로봇을 다루는 모든 상황에서^^. TF 구조를 트리형태로 시각화해주는 기능이 rqt에서 지원이 됩니다. 그런데 아래의 그림처럼 Plugins에 Visualization 메뉴에서 Tree가 보이지 않을때가 있습니다.


이럴때는 ros-humble-tf2-tools와

ros-humble-rqt-tf-tree를 설치하고~

rqt --clear-config로 한번은 실행을 해서 기존 설정을 살짝 초기화하고 보면,

저렇게 TF Tree가 보입니다.
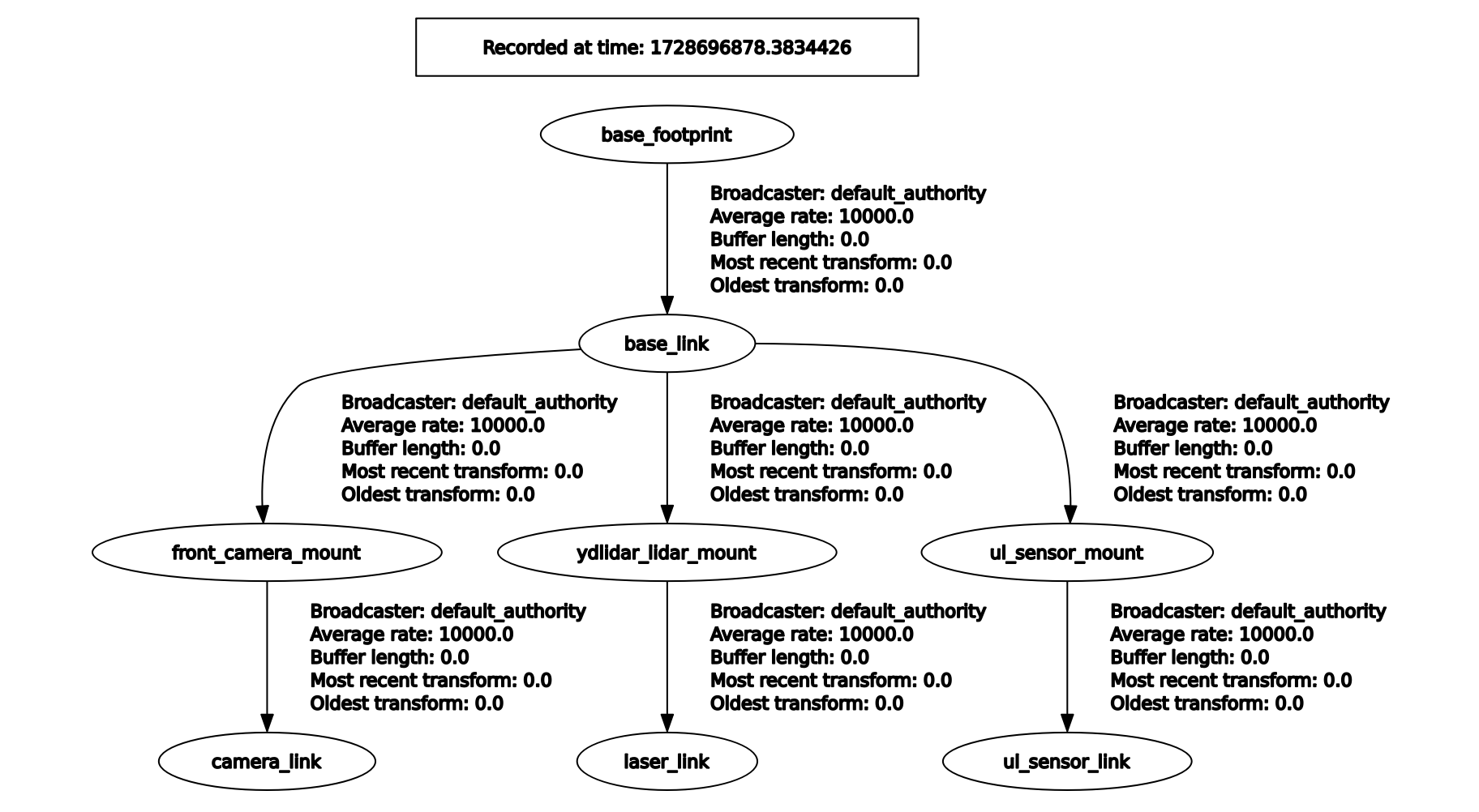
이제 로봇 URDF를 업로드해서 보시면 저렇게 시각화가 잘되는 것을 알 수 있습니다~^^
반응형
'Robot > Robot Program - ROS' 카테고리의 다른 글
| ROS2 교육 유데미 유료 교육을 오픈했습니다. (8) | 2024.11.21 |
|---|---|
| ROS2 무료 강의 R2R 응용편이 끝났습니다. (8) | 2024.11.11 |
| Mac에서 ROS2 humble 설치 및 원격 설정 (6) | 2024.10.24 |
| ROS2 유투브 강의 벌써 응용편으로 진입했습니다. -R2R- ROS2 강좌 (2) | 2024.06.13 |
| ROS/ROS2 사용할 때 Jupyter도 함께 써보세요. (0) | 2024.03.22 |
| 로봇 관제 OpenRMF - 핑크랩은 뭐가 다를까요? (0) | 2024.03.19 |
| ROS2 처음부터 차근차근 공부하고 싶으시다면 - 무료 R2R 과정 - (1) | 2024.03.18 |



