최근 저는 정말 바쁜 날을 보내고 있습니다. 그 와중에 그래도 소개할 팀은 또 소개해야죠?^^ 이번에 소개할 팀의 결과물은 저에게 딥러닝과 ROS2 등의 수업을 시작한지 대략 5개월이 되던 시점에 시작한 프로젝트의 결과입니다.

처음에는 어미로봇이 아가로봇(^^)들을 데리고 실외를 주행한 다음 실내에서는 아가로봇들이 동작하는 컨셉이었습니다. 그러나 배우는 단계의 학생들이라 자금의 여력이 충분치 않아서 안타깝게도 많이 생략해야 했던 ... 슬픔이 있습니다.

그래도 저는 이 팀이 잘했다 싶은 것은 스스로 수행한 일들이 아래와 같기 때문입니다.
- 차선 인식을 하기 위한 segmentation 모델 학습
- 인식된 차선으로 로봇 기동하기
- 차선 위의 장애물을 감지하고 회피 기동하기
- ROS2 slam을 이용해서 맵빌딩하고
- ROS2 navigation 패키지를 사용해서 주행하기
- 부족한 navigation의 성능을 확보하기 위한 고민하기


위 사진은 세그먼테이션 모델을 이용해서 차선을 인식하고 있는 장면입니다.

그로부터 기초적인 PID 제어기를 활용해서 차선을 잘 따라가도록 구현하고 있구요
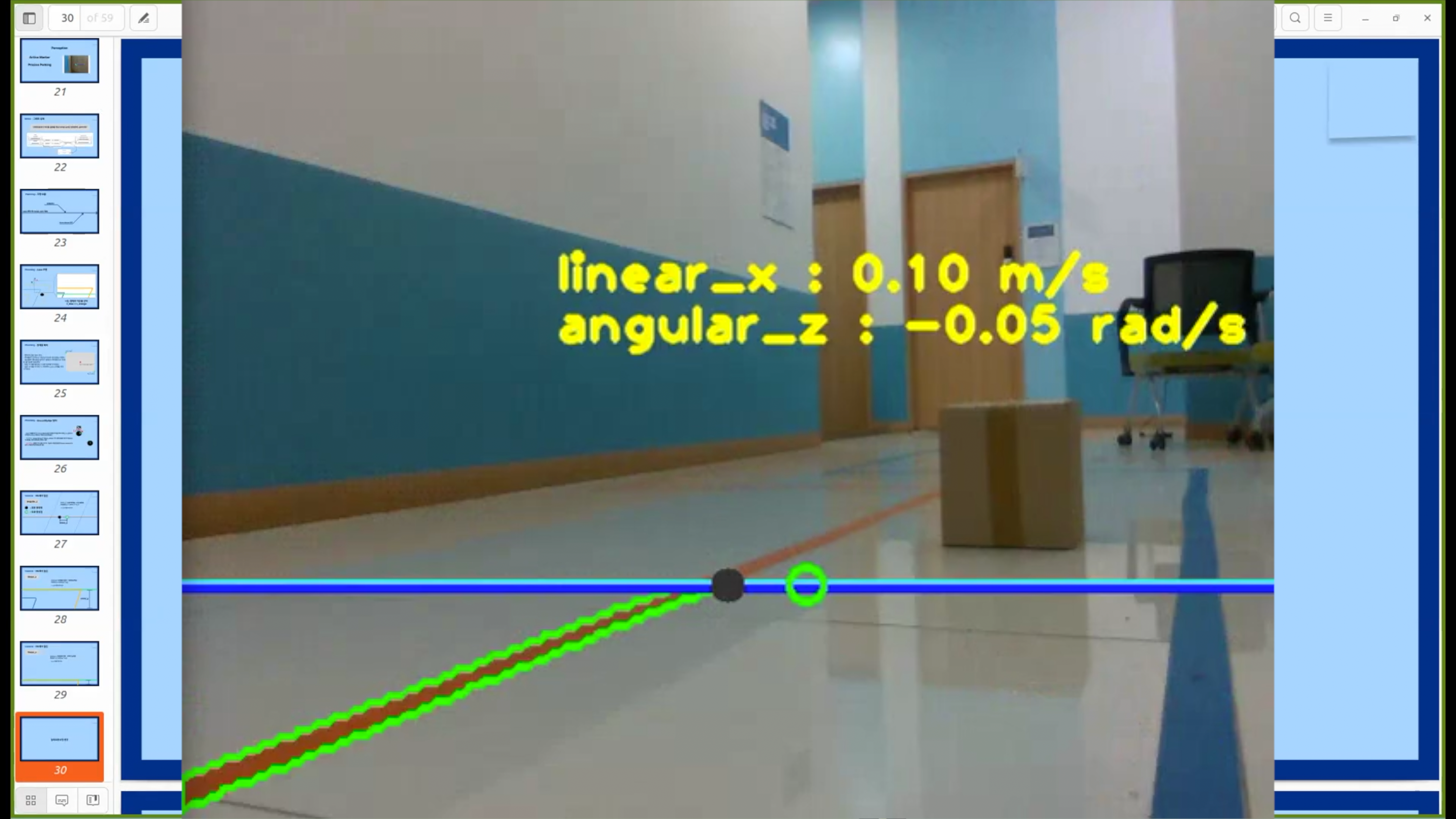

아래 영상에서도 나오겠지만, 회피 기동도 잘 하고 있습니다.^^

그리고 먼길을 갈때 간단한 움직임을 보여주지 않는 ROS navigation의 기능을 보완하기 위해

본인들이 A* 알고리즘을 활용하여 way point를 생성해서 주행하도록 알고리즘을 이용한 주행성능 개량을 시도했습니다.
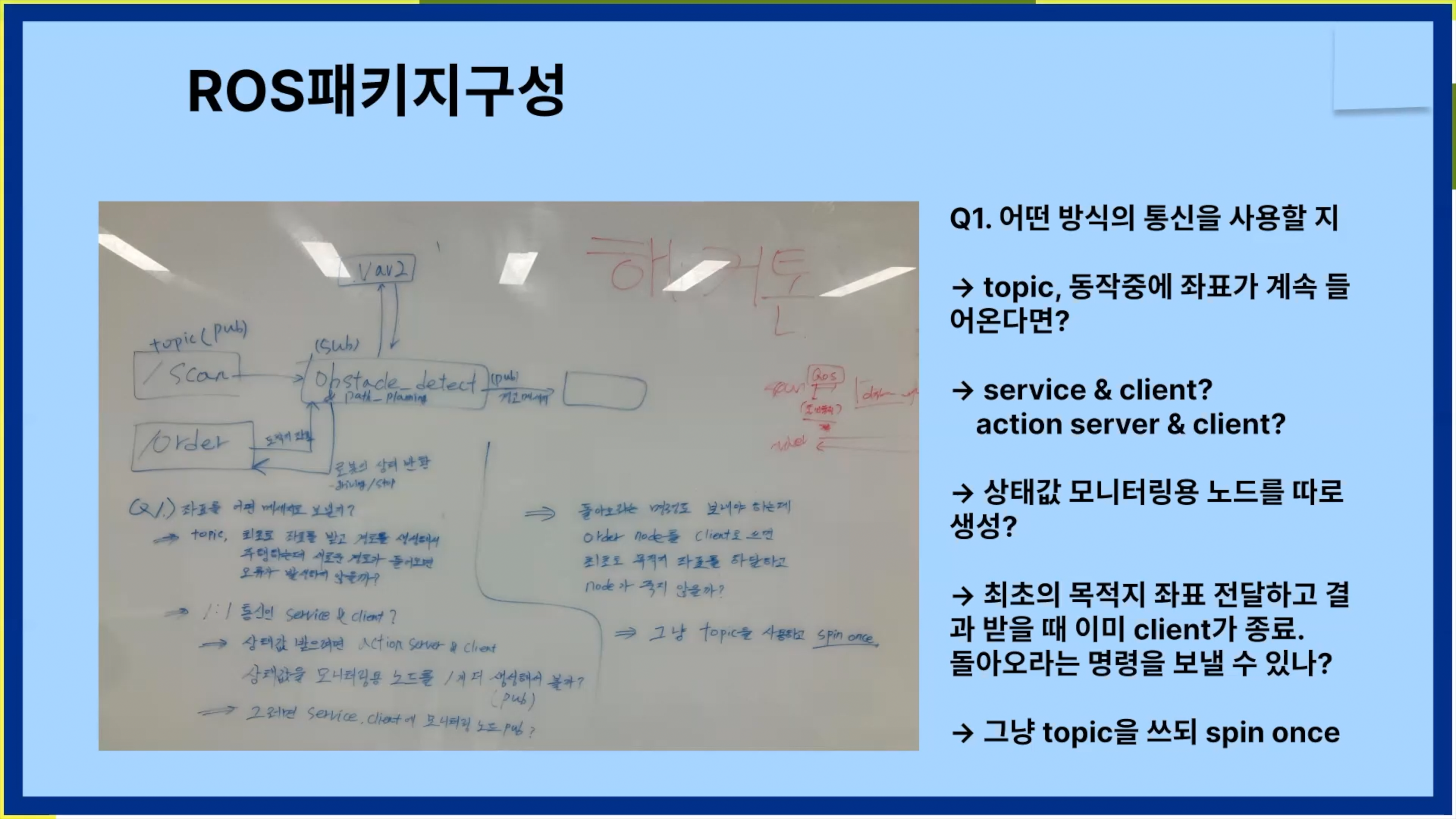

고민의 흔적들도 보이네요^^

아래 영상으로 발표장면을 확인하시죠^^
반응형
'Education' 카테고리의 다른 글
| [수강생 프로젝트 소개] 리뷰 분석 및 리뷰 가치 평가 (0) | 2023.06.12 |
|---|---|
| 핑크랩이 진행한 H Mobility 해커톤 대회 이야기 (4) | 2023.05.18 |
| [수강생 프로젝트 소개] 반려로봇 프로젝트 (1) | 2023.05.04 |
| [수강생 EDA 프로젝트 소개] 주변 맛집 데이터를 이용해서 슬랙으로 추천하기 (2) | 2023.03.03 |
| 아트센터 나비에서 예술쪽 분들에게 아두이노 교육을 진행했습니다. (0) | 2023.02.27 |
| [수강생 프로젝트 소개] 물건 사진으로 물건값을 계산하는 앱 (0) | 2023.02.13 |
| [수강생 프로젝트 소개] 빔프로젝트의 동작에 따라 자동 전등 스위치 조작 (0) | 2023.02.08 |



