Jetson nano 보드는 딥러닝을 동작시킬때 동급의 보드(Raspberry Pi 4)보다 좋은 성능을 보여줍니다. 이번에는 그럴때 사용하는 Jetson nano용 코드를 설치하는 것을 다루고 있습니다.

이번에는 젯슨 나노보드에 직접 HDMI 케이블로 모니터를 연결하고, 키보드와 마우스도 직접 연결했습니다.

일단 당연하지만 여러분들이 Jetson nano 보드를 가지고 있다고 보고,

MIPI 카메라 (흔히 라즈베리파이 카메라)도 연결했다고 보겠습니다.

그리고 또한 Jetson Download Center에서

SD 카드 이미지로 된 Jetpack을 받아서 (이글은 Jetpack 4.5가 설치되었다고 보고 있습니다.) 여러분의 Jetson nano 보드에 설치했다고 가정합니다.

위 그림에서 보이는 Jetson inference github 사이트에서

위 그림에 보이는 Building the Project from Source 메뉴를 클릭합니다.

그러면 나타나는 글의 Quick Reference에 있는 설치를 따라하면 됩니다. 따라하는 장면은 이 글 하단의 동영상에 잘 나타나 있습니다.

이제 python video-viewer.py csi://0라고 명령을 실행합니다.

그러면 영상이 나타나는데.. 혹시 영상이 뒤집혀 나타난다면~

위 그림처럼 --flip-methid=rotate-180 이라는 옵션을 사용하면 됩니다.

그러면 이렇게 잘 나타나는 것을 알 수 있습니다.

이번에는 detect-camera.py 코드를 --flip-method=rotate-180 옵션으로 실행하겠습니다. flip-method 옵션은 영상이 뒤집혀 보일때만 사용하세요.

저렇게 추론기가 동작해서 결과를 보여줍니다.
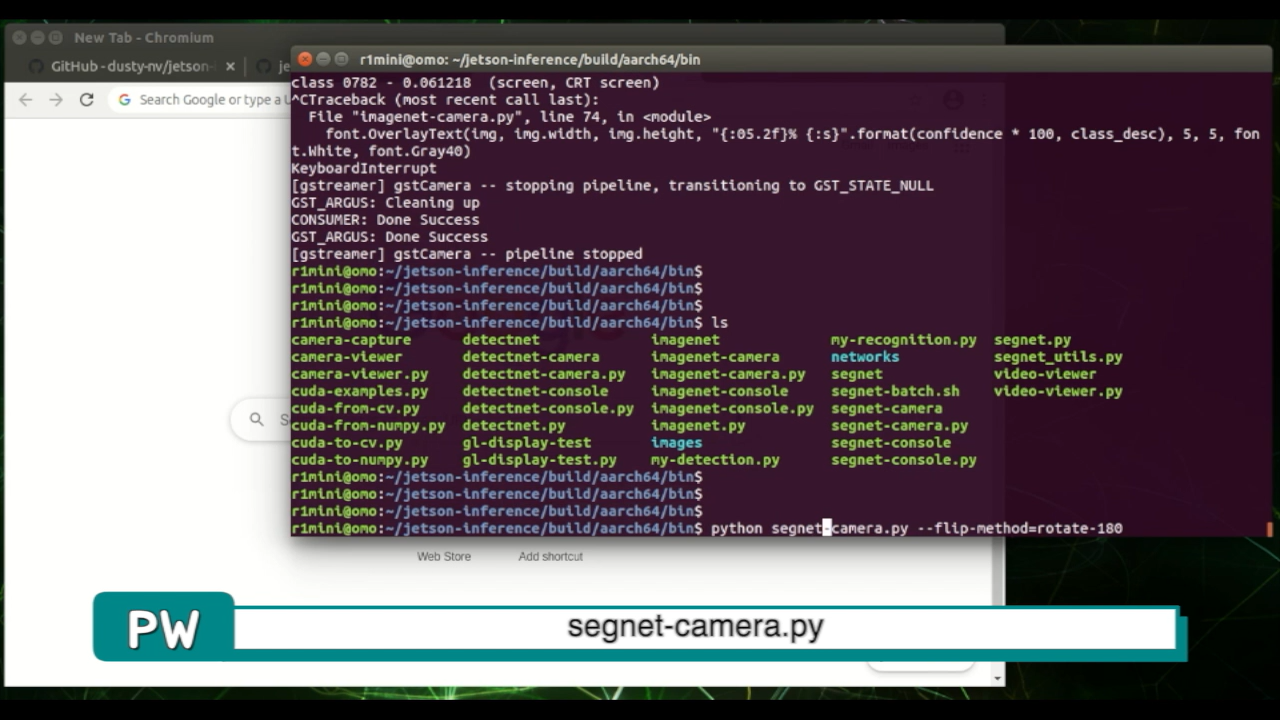
이번에는 segnet-camera.py를 실행합니다.

그러면 저렇게 segmentation 결과를 볼 수 있습니다. 이번에는 Jetpack이 설치된 Jetson nano 보드에 Inference 코드를 설치하고 실행하는 과정을 이야기 해 보았습니다. 모든 과정은 아래의 영상에서 또 나타납니다.
'Hardware > SBC (rasp, jetson, latte panda)' 카테고리의 다른 글
| 라즈베리파이와 원격 연결 - VNC (3) | 2024.10.03 |
|---|---|
| Raspberry Pi 5에 Ubuntu 24.04 설치하고 ssh 서버 설정하기 (0) | 2024.08.26 |
| Lattepanda 라떼판다에 ubuntu 22.04 설치하기 (4) | 2022.11.28 |
| Raspberry Pi 4 보드에 ROS foxy 설치하기 (8) | 2021.05.22 |
| Raspberry Pi 4에 Ubuntu 20.04 설치하기 (12) | 2021.04.12 |
| Jetson nano에 ROS2 foxy 설치하기 (4) | 2021.04.02 |
| 라즈베리파이에 VNC로 접속하기 (2) | 2021.01.22 |



