아주 예전에 제가 한양대 에리카에 연구교수로 있을 당시 잠시 관계가 있었던 프로젝트 중에 가구조립 프로젝트가 있었습니다. 저는 당시 다른일로 바빠서 대학원생에게 다 맡겨두고 거의 신경을 쓰지 못했었는데요. [지금 생각하니 너무 미안하군요ㅠㅠ] 그때 했던 연구 중에 로봇팔이 물체를 잡기 위해서 해당 물체의 Pose(자세)를 예측해야 더 잘 잡을 수 있을 거라고 생각을 했었습니다.
위 그림은 당시 대학원생이 작업한 것으로 가구조립에 사용되는 다양한 종류의 못을 보여주고 있습니다. 이 못의 자세를 알아야 로봇팔이 잡을 때 편하겠죠. 그래서 당시에 조금 인연이 있었습니다. 뭐가요? 아~ 바로 pose estimation 입니다.^^
프로젝트 개요

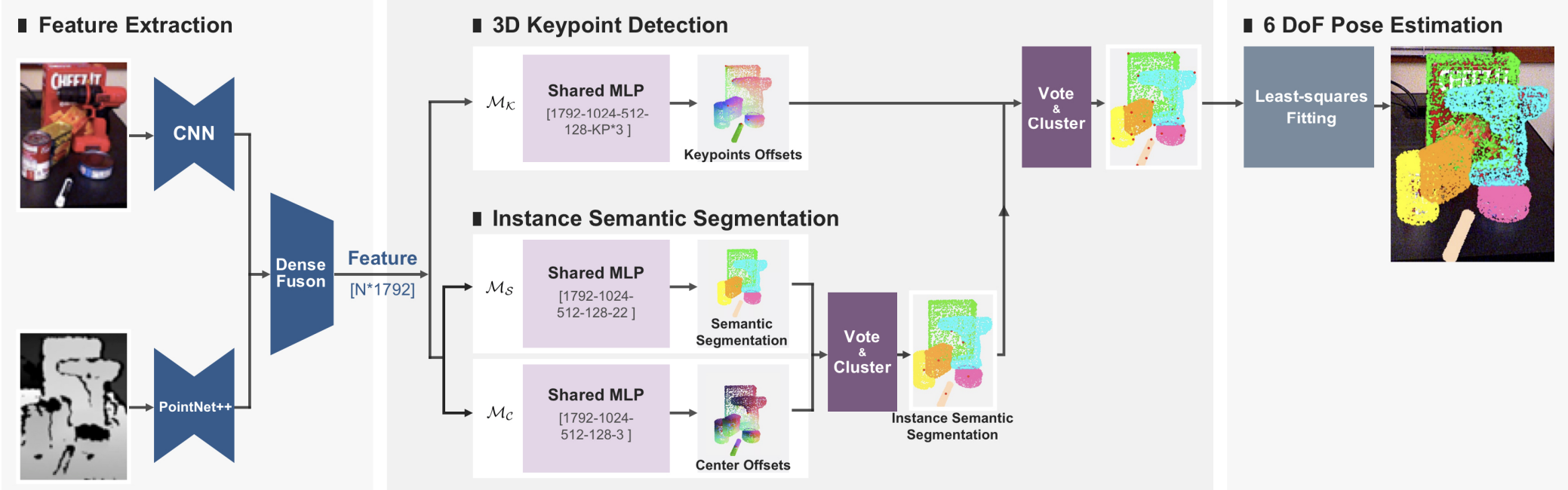
위 그림은 유명한 NVIDIA의 ISAAC 시스템에 포함된 기능으로 손수레의 자세 pose를 추정 estimation 하는 기술입니다. 참 희한하게도 일이 뭔가 시작되려고 하면 동시에 다가오는 것 같습니다. 저는 6월 초/말에 비슷한 일을 하는 두 물류로봇 회사로 부터 위 그림과 같은 pose estimation을 함께 작업할 수 있는지를 논의한 적이 있습니다. 첫 번째 연락이 닿았던 회사와는 안타깝게도 결렬되었지만, 그 후 연락온 다른 회사와는 이야기가 잘 진행되었습니다.
그래서 일단 간단히 짧은 3개월 정도의 기간동안 핑크랩이 이 과정을 open source와 기존의 발표된 논문들을 정리해서 클라이언트 회사에 적용할 수 있는지 타진해 보기로 했습니다. 3개월 후 클라이언트는 핑크랩의 성과를 보고 회사 자체에 팀을 빌딩할지를 결정할 예정입니다. 그 때 팀 빌딩도 핑크랩이 도움을 줄 수 있으면 좋겠네요.
진행 예정인 방향

일단은 Fast Shape FS 넷과 같은 많은 공개된 자료들을 바탕으로 기능들을 구현하고 해당 기능의 장단점을 클라이언트에게 제시할 예정입니다.
그 과정에서 어떤 어려움이 있는지, 어떤 장단점이 있는지 파악이 되어갈 거라고 기대하고 있으며, 그 결과가 클라이언트인 E사의 향후 방향을 결정하는 재료가 될 것 입니다.
본 프로젝트에서 핑크랩의 기대
이번 프로젝트는 핑크랩이 산업계로 들어가는 프로젝트 중에서 요소기술 하나를 또 확보할 수 있다는 기대를 합니다. 핑크랩은 이렇게 핑크랩과 연결된 다양한 인력을 배치해서 해당 인원은 프로젝트 경력과 (조금 적은 인건비라 슬프지만,.ㅠㅠ) 인건비를 챙길 수 있으며, (이번 프로젝트의 경우) 기업은 팀을 빌딩할지 말지, 혹은 팀을 만들때 어느 정도의 인력이 필요한지를 결정하는 중요한 자료가 될 것입니다. 더불어 딥러닝 관련 시니어급 인력이 없는 클라이언트는 이 과정이 진행되는 동안 시니어급 인력 채용을 할 수 있는 시간을 벌수 있다는 장점도 함께 가지고 있습니다. 핑크랩은 이 프로젝트에서 얻은 노하우를 결국 다시 교육 컨텐츠로 변환해서 핑크랩의 교육 노하우를 또 한단계 더 끌어 올릴 수 있다는 장점을 얻을 수 있을 것으로 기대하고 있습니다.
핑크랩의 다양한 기업프로젝트는 아래 링크에서 확인할 수 있습니다.
https://www.pinklab.art/project
기업 프로젝트
핑크랩에서 수행하는 기업 프로젝트는 일반적인 개발 용역 사업과는 조금 다릅니다. 프로젝트 자체의 수행도 중요하지만 기업의 인력 수요에 대한 대응, 혹은 구직자의 경력 확보 등이 포함된
www.pinklab.art
'Theory > Project' 카테고리의 다른 글
| 핑크랩이 문제풀이 학습 시장용 유사문제 찾기 알고리즘에 도전합니다. (0) | 2022.07.25 |
|---|---|
| 어학 학습용으로 사용하면 좋을 것 같은 발음 비교 (0) | 2022.07.22 |
| 전성분을 기준으로 유사화장품 찾기 (2) | 2022.07.13 |
| 노정석 대표님과 함께 프로젝트를 시작하게 되다... (2) | 2022.05.22 |



