여러 로봇을 ROS2에서 다루는 경우, 터미널마다 ros domain id가 혼돈되어 실수하는 경우가 자주 있죠. 이럴때 터미널에서 도메인 아이디를 보기좋게 표현되는 방법을 써보면 좋습니다.
바로 이렇게요^^ 일단 터미널에서 아래 코드를 넣어보죠.
GREEN='\[\e[1;32m\]'
BLUE='\[\e[1;34m\]'
NC='\[\e[0m\]'
PS1="${BLUE}(ID: \${ROS_DOMAIN_ID:-unset})${GREEN}\u${NC}${GREEN}@\h${NC}:${BLUE}\w${NC}\$ "이 코드를 최초 디폴트 터미널에 넣어보겠습니다.

그리고 나면

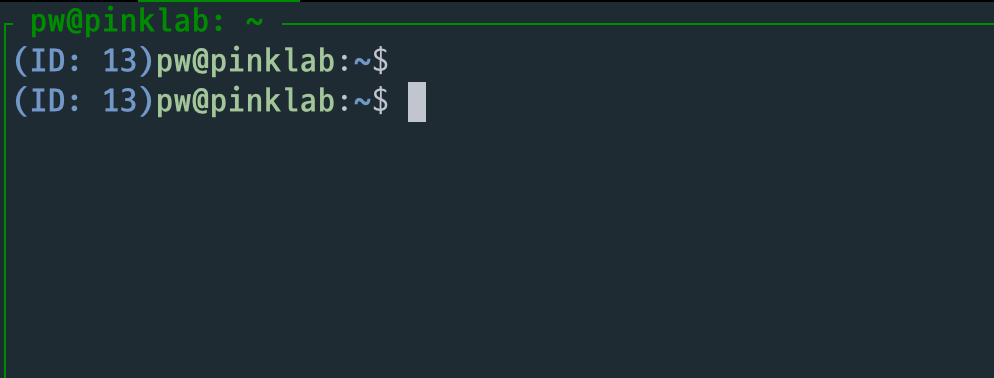
이렇게 됩니다. 만약 unset이 아니라, ros2가 동작하면 default가 0이니 0으로 하겠다고 하면,
GREEN='\[\e[1;32m\]'
BLUE='\[\e[1;34m\]'
NC='\[\e[0m\]'
PS1="${BLUE}(ID: \${ROS_DOMAIN_ID:-0})${GREEN}\u${NC}${GREEN}@\h${NC}:${BLUE}\w${NC}\$ "이렇게 하면 됩니다. 실행 결과는

잘 되네요. 이제 ros domain id를 export로 변경해보죠.

짠~^^ 이제 이 내용을 bashrc에 추가합니다.

추가하는 방법은 위 그림은 nano를 사용했지만, 아무 편집기를 사용하시면 됩니다. 그리고 나면 이제 터미널을 켤때마다 적용될겁니다.^^
이 내용을 다룬 영상을 함께 보시죠. 아래 영상의 13분 57초 지점을 보시면 됩니다,
https://youtu.be/NLZwZaMEhxA?si=HD8s0dMvCoaGjs2K&t=837
반응형
'Software > Ubuntu and Mint' 카테고리의 다른 글
| Ubuntu에서 pci에 연결된 NVIDA GPU 모델이 lspci로 읽혀지지 않을때 (1) | 2024.10.07 |
|---|---|
| 원격으로 Ubuntu에 접속해서 VSCode를 이용해서 Jupyter Notebook 사용하기 (0) | 2024.09.09 |
| SSH로 연결된 원격 PC에 scp 명령으로 파일 전송하기 (맥 -> 우분투) (0) | 2024.09.05 |
| TMUX보다 조금 편한 터미널 멀티플렛서 Zellij (2) | 2024.06.06 |
| Ubuntu에서 화면 녹화시 Wayland 관련 에러가 뜰 때 (0) | 2023.11.23 |
| Ubuntu PC로 SSH 접근하려고 할 때 문제가 생기면... (0) | 2023.10.31 |
| 우분투와 원도우를 듀얼부팅할 때 두 OS에 시간이 안 맞을 때 (2) | 2023.08.21 |



