- Simulation
- 1. 라그랑지 방법을 이용한 동역학 모델 구축하기
- Simulation
- 2. DC 모터의 동역학 포함시키기
- Simulation
- 3. MATLAB을 이용하여 시뮬레이션 구축하기
- Simulation
- 4. 시스템의 선형화
- Simulation
- 5. LQR 기법을 이요한 선형제어기 설계하기
- Simulation
- 6. 경로추적
사실 이 글을 연재중에 따로 넣을까 말까 고민을 좀 하긴 했는데요. 내용상 구분되는 내용이라 짧지만 그냥 올리겠습니다.

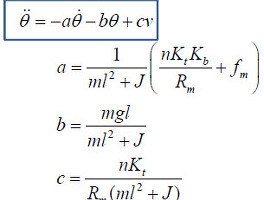
지난번에 라그랑지 방정식에 DC 모터의 방정식까지 넣어서 구축한 비선형 모델입니다.

흔히 MATLAB/Simulink를 이용해서 많이 시뮬레이션을 하죠. 그것에 따라 시뮬레이션을 해보면

위와 같이 꾸며집니다. Intergrator1번에 초기치를 1 라디안으로 설정하고, 제어입력을 '0'으로 만들면

위와 같이 자유운동하는 그래프를 얻을 수 있습니다.
Simulink를 구성하는 방법과 미분방정식을 구성하는것은
- MATLAB
- [MATLAB 연재] 5. Simulink의 기초
- MATLAB
- [MATLAB 연재] 8. 동역학 시뮬레이션 하기
의 글들을 확인해야합니다.
반응형
'Theory > Lecture' 카테고리의 다른 글
| [시스템 시뮬레이션 연재] 6. 경로추적 (tracking) (29) | 2010.08.16 |
|---|---|
| [시스템 시뮬레이션 연재] 5. LQR 제어기 설계 (44) | 2010.08.13 |
| [시스템 시뮬레이션 연재] 4. 시스템의 선형화 (3) | 2010.08.12 |
| [시스템 시뮬레이션 연재] 2. 구동원으로 DC 모터 고려하기 (64) | 2010.08.11 |
| [시스템 시뮬레이션 연재] 1. 라그랑지 방법을 이용한 동역학 모델 구축하기 (28) | 2010.08.09 |
| [공업수학] 미정계수법을 이용한 비동차 방정식의 풀이 (10) | 2010.04.06 |
| [공업수학] 상수계수의 동차선형방정식의 풀이 (4) | 2010.04.06 |