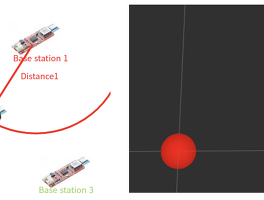
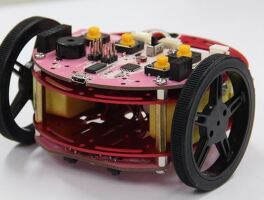
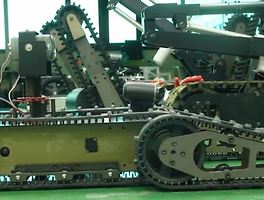
Robot/Project (45) 썸네일형 리스트형 핑크랩이 아트센터 나비와 서울대 UX랩에 기술적 지원 프로젝트를 진행했습니다. ESP32, UWB 등을 활용한 공간 위치인식 및 음성 전송 2023. 11. 12. 13:43 작년에 저는 아트센터 나비와 서울대 UX랩 분들을 대상으로 인력 양성 사업의 일종으로 아두이노 등 HW관련 수업을 진행했습니다. 그 인연으로 이번에 핑크랩이 ESP32, UWB 등을 활용한 공간 위치인식 및 음성 전송 관련된 프로젝트를 살짝 진행했습니다. 배경 https://pinkwink.kr/1418 아트센터 나비에서 예술쪽 분들에게 아두이노 교육을 진행했습니다. 시작은 작년인 2022년 10월부터입니다. 어떤때는 일주에 한번, 또 어떤때는 2~3주 걸러 한 번씩 금요일마다 오후에 진행되었습니다. 처음 이 건을 의뢰해 주신 분은 한국로봇융합연구원이었습니다 pinkwink.kr 이때 여러 대화중에 무언가 큰~~~~ 계획을 하시는 두 기관의 연구원들께서 프로젝트 진행의 부스트업, 진행속도의 가속력(^^).. 3D 카메라를 이용한 박스 인식 및 박스 위치 계산 - 디팔렛타이징 2023. 11. 11. 17:23 23년 추석이 있던 9월, 10월 2개월 동안 핑크랩은 한가지 재미있는 프로젝트를 진행했습니다. 저희에게 의뢰를 주신 기관은 구미에 있는 로봇직업혁신센터입니다. 의뢰를 받고 저희는 아래의 내용을 수행했습니다. 기존에 센터에서 보유하고 있는 ABB 로봇팔과 3D카메라를 이용해서 ABB로봇의 ROS1 패키지를 ROS2용으로 변경하고 3D 카메라의 영상에서 서로 붙어서 구분이 잘 안되던 박스들을 잘 인식하게 하고 인식된 박스의 윗면(평면)을 찾아서, 인식하고 인식된 박스들의 윗면 중 가장 높은 윗면을 찾아서 공간상의 좌표를 로봇에게 전송하는 일입니다. 우리는 재미있어 보이면 하니까요^^. 작업장은 이렇게 생겼습니다. 로봇직업혁신센터는 교육의 역할이 강하기 때문에 다양한 로봇과 실습환경이 꾸며져 있습니다. 거기.. PinkLAB이 Carla - Autoware 프로젝트를 잘 마쳤습니다. 2023. 6. 1. 08:00 이 프로젝트가 마친지가 꽤 되는데 이제야 소개글을 쓰네요. Carla와 Autoware를 함께 사용하려는 분들이 많아지고 있는데요. 이번에 저희는 두 도구를 ROS2에서 사용하려는 목표를 가진 회사의 의뢰를 받았습니다. 목표는 아래와 같습니다. 회사내 막 빌드 중인 개발팀이 바로 사용할 수 있도록 Carla와 Autoware를 Ubuntu 20.04에서 ROS2용으로 환경설정을 하는 것을 문서화 Carla의 사용법과 Autoware의 사용법을 문서화 위 두 가지를 모두 잘 하는 신입 엔지니어 취업 주선 아래의 글에 그 내용을 정리하면서 핑크랩이 프로젝트를 진행한다고 알렸었죠. https://pinkwink.kr/1420 핑크랩이 carla, autoware, ROS2 관련 프로젝트를 시작합니다. 저는 최.. 핑크랩이 carla, autoware, ROS2 관련 프로젝트를 시작합니다. 2023. 3. 4. 17:38 저는 최근 긴기간 진행한 AI 로봇 기술관련 [해당회사에서는 로봇으로 제품을 출시하는 것이 아니어서^^] 프로젝트를 마치고 잠시 소강상태였다가 이번에 새롭게 짧은 기간으로 새로운 프로젝트를 진행합니다. carla는 자율주행 시스템용 시뮬레이터로 unreal 엔진 기반인데 요즘 관심있는 분들이 많으시죠. 이번 클라이언트는 무거운 이 도구들과 ROS2를 이용하여 원할한 시뮬레이션 환경을 회사내에 구축하고 싶어 합니다. 그래서 클라이언트와의 상담으로 저희 핑크랩은 인턴쉽을 핑크랩 내에서 진행하고 해당 인턴이 클라이언트가 원하는 산출물을 직접 개발하도록 유도하고 그 산출물과 함께 직원으로 해당 회사에 합류하도록 진행합니다. 매우 핑크랩과 어울리는 진행입니다.^^. CARLA는 처음부터 자율 주행 시스템의 개발,.. 아웃도어 분야 자율 주행 로봇관련 기업 프로젝트를 마치며... 2023. 2. 15. 23:42 처음 미팅한 것은 22년 한참 더웠던 여름 7월 쯤이었습니다. 대기업 자회사였던 클라이언트는 아웃도어 분야로 새롭게 진출하기를 원했던 모양입니다. 주행 로봇 기술이 필요하다고 판단을 했고, 어떻게 저떻게 저에게까지 연락이 되었습니다. 그리고 저는 제품의 목표에 대해 제가 생각한 내용을 이야기하면서 점점 구체화된 내용으로 8월 초에 팀을 빌딩하면서 저의 역할이 시작되었습니다. 프로젝트 시작 그렇게 시작된 일에서 제가 목표로 잡은 것은 다음과 같습니다. 팀빌딩 : 회사의 관련 제품의 개발조직이 아직 만들어 지지 않았었습니다. 그래서 클라이언트가 생각한 제품의 기술적 목표를 설정하고 팀빌딩을 고민하기 시작했습니다. 기술 개발 방향 설정 : 자문 회의 단계에서는 클라이언트가 원하는 제품의 목표를 이해하려고 노력.. 핑크랩이 아웃도어 스포츠에서 사용될 딥러닝을 이용한 자율주행 모델 개발에 참여합니다. 2022. 7. 28. 08:00 최근 제가 설립한 회사인 핑크랩의 프로젝트들을 몇몇 언급하고 있는데요. 이번에 또 하나의 프로젝트를 시작해서 기쁜 마음으로 알려드릴려고 합니다. 이번에 핑크랩은 아웃도어 스포츠에서 활용할 자율주행 모델을 개발하려는 클라이언트의 초기 과정에 합류하기로 했습니다. 아웃도어이다보니 GPS만 사용할 수가 없다는 판단에 딥러닝도 함께 이용하려고 합니다. 핑크랩의 역할 이번 프로젝트에서 초반 개발에 맨파워가 4명 정도에 리더가 필요하다고 생각했습니다. 리더급 개발자가 확보될때까지 그 역할을 제가 하면서 초반 맨파워에 제가 추천한 3인이 들어가고, 또 이 프로젝트를 위해 클라이언트가 직접 채용한 1인으로 구성되었습니다. GPS 기반으로만 진행되면 좋겠지만, 클라이언트가 생각한 시나리오에 필요한 기능들과 GPS를 저가.. 로봇 젤리비 Jellibi를 소개합니다. 2018. 7. 27. 08:00 얼마전에 저의 두 번째 책이 출판되었다는 이야기를 드렸는데요. 이 책에는 젤리비 Jellibi 보드가 함께 포함되어 있습니다. 아두이노 나노 보드인데요. 지금 한 참 집필 중인 후속책에는 로봇 몸체와 배터리 등의 악세사리가 있지요. 두 권을 합치면 로봇 젤리비 Robot Jellibi가 됩니다.이렇게 되는거죠. 실물입니다.^^. 사실 이 로봇 젤리비는 아두이노 나노 보드에 몇 개의 액세사리를 포함한 너무나도 노멀한 제품입니다. 더구나 책에 포함되는 컨셉이라 별도 판매도 하지 않구요. 그러나 수술용 로봇이나 OIS 등에서 제어파트만 하던 저에겐... 오랜만에 완성품을 내놓은 거라 너무 이 작은 로봇에 정이 많이 간답니다. 아~ 아시죠? 저는 흔히들 알고리즘 엔지니어라고 부르는 파트여서, 이 로봇에 대해서는.. 소형 재난용 정찰 로봇 AstroBoyS Flipper 2013. 12. 26. 06:00 요즘 저희가 직접 만드는 로봇에 대한 소개가 좀 뜸했네요^^. 그래서 오늘은 소형 재난용 정찰 로봇을 하나 소개할까 합니다.^^ 이름은 AstroBoyS 시리즈에서 소형 플리퍼 타입의 로봇이지요^^ 저렇게 찍으니깐 좀 멋지게 나오지 않았나요?^^. 예전에 보여드렸던 모델[바로가기]과 비교하면 플리퍼에도 궤도가 장착되었다는 것이 다르답니다. (형태적으론^^) 그러나 이 플리퍼라는건 꽤 신경이 많이 쓰이는 작업입니다. 사용하는 경우나 그냥 한번쯤 호기심에 보는건 괜찮은데 잘 만들려고하다보면 결국 난이도와 가격에 타협하는 수 밖에 없습니다. 저 플리퍼도 적재하중을 인가한 상태에서 무게를 들게 되면 무게가 한 축에 몰리면서 무리가 될 수 있거든요. 그 부분을 극복하는 건 꽤 힘든 일입니다. 뭐 아무튼 언젠간 정.. 이전 1 2 3 4 ··· 6 다음