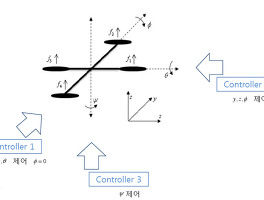
예전에 소개한 적이 있는 투로터입니다. 그때

시스템의 동역학 방정식의 결과가 위와 같았었습니다.
제어입력을 다시 치환하고, 시뮬레이션을 위해 몇몇 인자를 편하게 잡고 보면

위와 같은 형태가 됩니다. 원래 위 투로터시스템의 제어기로 궤환선형화기법을 소개한적이 있습니다. 근데 궤환선형화기법의 제어입력을 보면, 그 제어입력을 도출하기 위해 꽤 많은 요소들을 필요로합니다. 이번엔,
2009/07/07 - [쿼드콥터/Reference] - T-S Fuzzy Modeling
2009/07/20 - [공학기초/Robot] - T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계
에서 소개한 T-S 퍼지 모델을 이용한 제어기의 구성을 한 번 살펴보겠습니다.

일단 y쪽에 -1이라는 상수항이 있어서 얘를 좀 어떻게 하기 위해 위에서처럼 제어입력을 u1에서 u_tild로 변경하겠습니다.

그리고 다시 정리하면 위와 같습니다.

로터리를 이용한 T-S때도 이야기 했지만, T-S퍼지모델은 그 결과가 대부분 위와같은 형태가 됩니다.

이때 선형독립인 함수를 세개를 잡아야겠네요. 그럼 뭐 퍼지규칙은 8개가 되겠지요.

그 g1,g2,g3를 이용해서 상태행렬처럼 표현해본겁니다. 위와같이 표현하면 상수행렬 F를 잡는데 편리합니다.
동작구간을 설정하고

각 함수들의 최소. 최대값을 잡습니다.

각 h들입니다.

히죽... 멤버쉽함수가 만들어지는군요^^

위 식에다 살짝 넣어주면 A, B행렬들이 나타납니다.

각 F행렬들입니다
i번쨰 제어입력이 위와같다면

전체 제어입력은 위와 같을 겁니다. 이를 다시 원 방정식에 대입


하여 정리해볼 수 있습니다.
이때 시스템의 안정도를 높이기 위해 위와같이 출력제한을 겁니다.


위 부등식을 만족하는 양정의행렬 P를 찾아주면 됩니다.
라 하고

양변에 곱하면 위와 같은 선형행렬부득식(LMI)이 나타납니다.


그걸 MATLAB으로 풀어보면 위와같은 제어게인 8개를 얻을 수 있습니다.
 |  |
 |  |
 |  |
 |  |
음 위 결과를 보시면 대체로 궤환선형화 기법과 비슷한 결과가 나타남을 알 수 있습니다. 뭐. 일부 장점도 보이긴 합니다만, 그리 큰 장점이라고 보긴 어렵구요. 그러나 실제 구현에서는 상상해보면, 꽤 큰 장점이 뭐냐면, 제어입력을 결정할때, 궤환선형화기법처럼 상태나 제어입력자신의 미분치나 혹은 두번 미분, 심지어 3번미분치까지 사용할 필요가 없다는 것입니다. 이는 분명 큰 장점을 가지는 것이겠네요^^
반응형
'Theory > ControlTheory' 카테고리의 다른 글
| Cart Pendulum의 동역학 유도 (22) | 2009.11.06 |
|---|---|
| 내부모델설계기법 Internal Model Design (2) | 2009.10.07 |
| T-S 퍼지를 이용한 쿼드콥터 제어 (22) | 2009.07.23 |
| T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 (4) | 2009.07.20 |
| 투로터제어기를 이용한 쿼드콥터 제어기 설계 (12) | 2009.05.31 |
| 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 (8) | 2009.05.19 |
| 쿼드콥터(Quadcopter)의 동역학 방정식 (42) | 2009.05.19 |