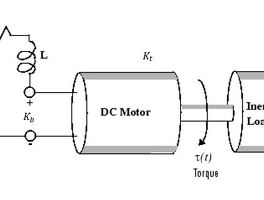
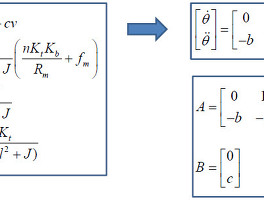
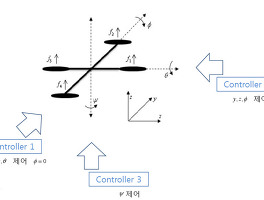
제어기 (9) 썸네일형 리스트형 [DC 모터 제어] 위치 제어기의 설계 및 MATLAB에서 시뮬레이션 2015. 5. 29. 07:00 요즘은 뭔가 정체성에 대해 고민한답니다.ㅠㅠ. 이제 6월이 되면 18개월이 되는 우리 아가 미바뤼를 보면서 에휴~~~ TV의 육아 프로그램에 나오는 그런것들 다 해줄 수 없어서 한숨도 나오고... 또 맞벌이 하는 와이푸님이 가끔 육아와 함께 힘들다고 하면 또~~ 월급 명세서를 보면서 내가 좀 더 잘 할 수 없을까.. 한숨 쉬기도 합니다...ㅠㅠ. 그러다가 또 저녁이 있는 삶을 꿈꾸는 뭔가 이상한 앞뒤가 안 맞는 이런 상황이라.... 아무튼... 뭔가 살짝... 꿀꿀해지는 2015년 5월의 막바지.. 인가 봅니다. 뭐.. 그러거나 말거나^^ 오늘은 전통적인... 교과서적인... 모터제어에서 이전에 설명한[The Robot/ControlTheory] - [DC 모터 제어] DC 모터 동역학 및 전류제어기의 .. [DC 모터 제어] DC 모터 동역학 및 전류제어기의 MATLAB을 이용한 시뮬레이션 2015. 4. 14. 07:00 아주 예전에는 DC 모터 자체를 제어하는 것보다는 시스템에 구동원인 DC 모터를 전체 동역학에 포함시켜서 시스템을 제어하는 것[바로가기]을 했었습니다. 그 대표적인 것이 밸런싱로봇[바로가기]이었는데요. 그리고 나서 모터 자체에 대한 제어기에도 당연하지만 관심을 가졌었는데요[바로가기] 아무튼 최근 다시 좀 올드한 스타일, 그러면서 교과서적인 스타일의 DC 모터 제어 기법을 블로그에 소개해야겠다는 생각을 하게 되었네요^^. 일단 본 글은 제어기법자체는 설승기 교수의 전기기기제어론이라는 책 아~~~주 초반에 소개된 내용을 바탕으로 합니다.^^ 일단 DC 모터를 위와 같이 표현할 수 있다면 각 심볼을 위와 같이 정의하구요.(단위에 조심하세요^^) DC 모터의 전압방정식을 저렇게 만들 수 있습니다. 일단 기본적으.. [연재] 3D 프린터란? - 오픈 소스 기반의 3D 프린터 2014. 1. 6. 06:00 허접한 실력과 안목으로 이런 연재를 시작하겠다는 것을 생각했다는 것 자체가 2014년 올해 최대 실수이지 않을까 합니다.ㅠㅠ. 뭐 아무튼 이전에 3D 프린터의 탄생과 일반적으로 데스탑형 프린터, 개인용 프린터, 저가형 프린터 등등의 여하튼 한 100만원에서 300만원대 가격을 형성하고 있는 3D 프린터들의 큰 두 줄기인 FFF 방식과 SLA 방식에 대해 이야기를 했습니다. 이 두 방식은 어떻게 재료를 적층하는가에 대한 기준일 뿐입니다. 여기서 다시 기구적인 형태로 또 분류를 하기는 하는데 그건 크게 다룰 생각이 없습니다. 왜냐면 제가 잘 모르거든요^^. 아무튼~~ 지난번 연재에서 FFF 방식의 3D 프린터에 요구되는 기술 혹은 기능이라고 정리를 했었습니다. 3DP 1. 3D 프린터의 탄생 3DP 2. 3.. [시스템 시뮬레이션 연재] 5. LQR 제어기 설계 2010. 8. 13. 13:55 이번에는 지난번 선형동역학의 상태방정식 표현에 이어 대표적인 선형제어기인 LQR에 대해 이야기를 할려고합니다. 깊이있는 이야기가 아니라 그저 소개와 함께 실제로는 어떻게 LQR 제어 게인을 얻는지에 관한 이야기입니다. Simulation 1. 라그랑지 방법을 이용한 동역학 모델 구축하기 Simulation 2. DC 모터의 동역학 포함시키기 Simulation 3. MATLAB을 이용하여 시뮬레이션 구축하기 Simulation 4. 시스템의 선형화 Simulation 5. LQR 기법을 이요한 선형제어기 설계하기 Simulation 6. 경로추적 기본적인 LQR의 개념 ! 일반적인 선형시스템의 상태방정식은 dot_X = A*X+B*U의 형태입니다. 거기서 제어입력 U를 U=-KX 로 두고 다시 정리하면 .. [밸런싱 로봇 만들기] 10. LQR 선형제어기 설계 및 MATLAB을 이용한 시뮬레이션 2010. 7. 3. 04:25 비가 오는듯 마는듯합니다. 분명 장마라고 하던데... 방금 예전에 제가 알바로 일했던 입시학원의 예전 선생님들을 만나 소주한잔 하고 왔습니다. 당시 저는 고등부 수학을 수업했었는데, 그때 이야기들을 한참하며 떠들고 웃었네요. 그 때, 한때는 학원강사로 평생을 일할까하는 생각도 했었는데, 지금은 이렇게 백수로 살고 있네요. 그래도 그 분들과의 오랜만의 자리가 너무 즐겁고 재미있었습니다. 한잔을 더 하고 싶지만, 어지러워서...ㅠㅠ 그래서 술이나 깰겸... 연재를 다시 올리네요..^^ Balancing Robot [밸런싱 로봇 만들기] Yaw 움직임을 포함한 동역학 Balancing Robot [밸런싱 로봇 만들기] Lego Mindstorm 동역학 따라하기 Balancing Robot [밸런싱 로봇 만들기.. 부유체 위의 크레인 제어기 설계 - 1. 궤환선형화기법 2010. 2. 23. 20:36 궤환선형화 기법을 이용한 제어기 설계 ! 이 전에 구축했던 부유체 위의 크레인의 동역학[[프로젝트/ControlTheory] - 부유체 위의 크레인 동역학]에서 라그랑지 방정식 부분 에서 힘에 관해 식을 다시 변경하고 이렇게 적어볼 수 있을 겁니다. 여기서 입니다. 그 식을 다시 적으면 으로 표현할 수 있는데요. 여기서 e는 오차입니다. 그러면 이렇게 오차에 대한 선형시스템을 구축할 수 있는데요. 이제 위 시스템을 안정화 할 수 있는 a, b, c, d를 구성하면 됩니다. 실제 크레인의 정확한 제원을 몰라서 그냥 임의로 설정했습니다. 제가 이전글[[프로젝트/ControlTheory] - 부유체 위의 크레인 동역학 - 2. 절대좌표계에서 상태를 설정]에서 말했듯이, 트롤리의 절대좌표계에서의 수평위치를 기준.. T-S 퍼지를 이용한 쿼드콥터 제어 2009. 7. 23. 17:52 이미 쿼드콥터의 동역학은 이야기했구요. 그 동역학은 이었습니다. 여기 대해 T-S 퍼지 모델을 적용해서 PDC 방법으로 제어기를 설계해볼려고 합니다. 이미 T-S 퍼지 모델에 대한 이야기는 많이 했는데요. 그 사용방법은 2009/07/07 - [쿼드콥터/Reference] - T-S Fuzzy Modeling 2009/07/20 - [공학기초/Robot] - T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 2009/07/20 - [쿼드콥터/ControlTheory] - T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 위에 모두 소개되었습니다. 그중 쿼드콥터에 적용할 것은 Two-Rotor 시스템에 적용한 것과 같은 것이라고 생각해도 괜찮습니다. 제어입력을 위와같이 변경합니다. 이유.. 투로터제어기를 이용한 쿼드콥터 제어기 설계 2009. 5. 31. 05:38 이번에 보여드릴 쿼드콥터 제어기법은 음... 어느날 문득 생각나서 해봤는데 되더군요... 긴가민가하긴 했지만, 뭐 덜컹되니까 살짝 기고만장했더라는...ㅋㅋㅋ 위 그림처럼 쿼드콥터를 세개의 제어기로 제어하겠다는 이야기입니다. 일단 왜 이런 생각을 하게 되었냐면 2009/05/19 - [쿼드콥터/ControlTheory] - 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 위 글에서 설계했던 제어기는 그 제어입력을 보시면 알겠지만 너~무 제어입력이 복잡하거든요. 그래서 쿼드콥터의 동역학 방정식을 막 째려보던 (실제로는 멍~ 때리는 수준) 중에 phi를 0로 둔것과 theta를 0로 둔 결과식이 투로터와 몹시 닮았다는걸 알게된겁니다...^^ 이미 2009/05/19 - [쿼드콥터/ControlTheory] - .. 이전 1 2 다음