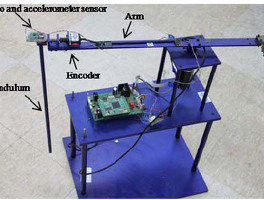
자이로 (16) 썸네일형 리스트형 Arduino Nano Sense 33 BLE 가속도, 자이로, 지자기 센서 사용해보기 2020. 12. 30. 08:00 지난번에 아두이노 나노 센스 33 BLE 모델을 소개했는데요. 이번에는 그 중에서 관성센서인 지자기, 가속도, 자이로의 값을 어떻게 받아 오는지를 한 번 보겠습니다.매우~ 심플하게 저렇게 PC와 연결하구요~아두이노를 실행하 다음 스케치 -> 라이브러리포함하기 -> 라이브러리 매니저를 실행합니다. 그리고 LSM9DS1을 찾습니다. 그게 칩이름이거든요^^설치를 완료한 후에 (혹시 아두이노를 다시 실행해야할 수도 있습니다.) 파일 -> 예제 -> Arduino_LSM9DS1에 가면 자이로, 가속도, 지자기 센서를 사용할 수 있는 예제들이 있습니다.네, 가속도 센서예제이고, 간단히 실행한 다음 시리얼 모니터로 확인해보면 각각의 축별 가속도 측정값이 잘 들어온다는 것을 알 수 있습니다.그 다음은 자이로 센서 예제.. 너무나 멋진 IMU 모듈 - Sparkfun Razor 9DoF IMU M0 2018. 4. 30. 08:00 한때 정말 허접하지만, 저도 IMU 모듈중에서 ARS 모듈을 만들어보았던 적이 있습니다. 몇 번 이야기한 적이 있는데, 어떻게 그렇게 단지 공부만 한 걸 가지고 상용화하려 했는지 지금 생각하면 참 무모합니다.^^. 뭐 그러나... 또 한편으로는 단지 공부한 내용을 가지고 상용화할 수 있는 환경에 있었다는 것이 또한 남들보다 더 좋은 환경이었는지도 모릅니다. 최소한 다른이들은 못해본 많은 경험을 하게 되니까요.^^. 오늘 소개해 드릴 아이는 Sparkfun의 Razor 9DoF IMU M0입니다. 엄청 좋은 아이입니다. 확실히~~^^ 해외 사이트 판매 가격은 35달러가 좀 안되구요. 공식 가이드 문서도 꽤 잘 되어 있습니다. 대략 4만원 정도 가격으로 할 수 있는 것은 일단 너무나도 훌륭한 IMU 센서 모.. 아두이노에서 자이로, 가속도 센서 MPU6050 테스트 2018. 4. 4. 08:00 저는 아주 예전에 자이로센서나 가속도센서로 실험을 꽤 했던 적이 있습니다. 그 때가 아마 7~8년 전인 것 같습니다. 그렇게 해서 2009년 6월경 자이로센서와 가속도센서를 융합해서 각도를 측정하는 방법인 상보필터라는 개념을 블로그에 포스팅[바로가기]했었죠~^^ 그리고, 다시 그로부터 몇 년 후 학교를 졸업하고, 첫 직장에 과분하게도 연구소장[바로가기]이라는 직함을 받으면서 진행했던 초반부 작품으로 각도 측정 모듈을 출시[바로가기]했었습니다. 지금 생각해보면, 제품 개발의 프로세스도 모르면서 그냥 뭐 이렇게 하면 되겠지하고 막연히 밀어부친.. 무책임한 제품이었습니다. 갑자기 이불킥이라도 하고 싶네요ㅠㅠ. 아무튼 그리고나서 이런류의 제품들은 사라져 갔던 것 같습니다. 왜냐면 칩 chip 레벨에서 이미 너무.. Complementary Filter 공부에 도움이 되는 논문 2010. 8. 24. 05:35 제가 자주 소개한 자이로-가속도센서를 이용한 각도추정기법이 사실 관련 전공분야에서의 정식 명칭은 Complementary Filter 입니다. 우리말로 꼭 번역하자면 상보필터.. 정도 될까요?? 그러나 요즘은 논문들도 번역이 껄끄러운 경우는 그냥 영어로 표기하는 경우가 많아지고 있으니 우리도 그냥 Complementary Filter라고 해두죠.. 뭐^^ Albert-Jan Baerveldt, and Robert Klang, “A Low-cost and Low-weight Attitude Estimation System for an Autonomous Helicopter,” IEEE international conference on intelligent engineering systems, proceed.. 자이로센서와 가속도센서를 이용한 각도추정 필터에 관한 논문 소개 2010. 7. 22. 06:01 아주 예전에 자이로 센서와 가속도센서를 이용해서 각도를 추정하는 기법에 대한 이야기[관련글]를 했었습니다. 물론 그 후 관련글들을 계속 포스팅하기는 했는데요. 그 후 많은 분들이 그와 같은 기법에 대해 이해가 잘 되지 않는다는 말씀을 많이 하셨었습니다. 이번에 논문을 준비하다가 우연히 이해하기 쉬운 논문을 하나 발견해서 소개해드릴려고 합니다. 제목은 관성센서를 이용한 도립진자의 제어를 위한 상보필터 설계 및 성능평가(Design and Performance Evaluation of a Complementary Filter for Inverted Pendulum Control with Inertial Sensors)라는 논문인데요. 저자는 나카시마 토시타카, 장문제, 홍석교이고, 2004년 정보 및 제어 .. [밸런싱 로봇 만들기] 작은 로봇을 하나 완성해서 큰 기쁨을 얻다 2010. 7. 18. 04:52 이제 기나긴 밸런싱 로봇 만들기 연재를 완결지어야겠습니다.^^. 성질 급하신 분들은 제일 아래 동영상을 먼저 보고 오셔도 됩니다.^^ 제가 만든 방식대로 따라하실려면 이 글에서 제가 링크를 건 모든 문서를 읽어보시길 권장합니다. 왜냐하면, 이번 연재는 실제로 로봇을 만들어가면서 작성된 글이기 때문에 제가 실수하거나 의문이 들었던 부분들도 모두 들어있고, 다시 그 실수나 의문을 해결해가는 과정도 있기 때문입니다. 또한, 단순한 기초지식은 다루지 않았습니다. 특히, DSP 혹은 이 글을 따라하시려고 준비한 마이크로프로세서 무엇이든 어느정도 기초는 알고 있다는 가정입니다. 즉, 엔코더나 ADC 정도, 시리얼 통신, 더 단순하게는 컴파일러의 사용법 정도는 알고 있다는 가정입니다. Balancing Robot [.. 자이로센서와 가속도센서를 이용한 각도추정 1차필터 2010. 7. 3. 04:25 사실.. 자이로센서와 가속도센서의 병합(fusion)에 대한 이야기는 더이상 할 필요가 없을 줄 알았습니다. 그런데, 제 블로그에 자주 오시는 "재오리"님께서 알려주신 링크를 따라 가보니 재미난 이야기가 있더군요.[방문해보기] 언제 한번 포스팅을 해야겠다고 생각했지만, 차일피일 미루다 이제 하게 되네요^^ 먼저, 하도 오래전 이야기라 역사를 좀 이야기를 해야겠네요^^. 각도를 측정하는 센서중 가장 정확하다 싶은 것은 아마 다들 엔코더라고 생각하실것 같습니다. 그런데 항공기나 배, 하여간 공중에 떠있거나 어떤 기준점을 잡을 수 없는 경우 이 엔코더는 무용지물이 됩니다. 왜냐면 엔코더는 자신을 지지하는 곳에서 바라본 상대각도를 잡기 때문이지요. 결국, 로봇(혹은 어떻 항공기든)이 자신의 기울어진 각도를 알기.. 자이로와 가속도센서를 이용한 각도추정 필터를 C로 구현하기 2010. 2. 10. 12:30 예전에 자이로센서와 가속도센서를 이용한 각도추정 필터 를 소개한 적이 있는데요. 그 후 각도추정필터의 계수를 최소자승법으로 구하는 방법 을 다시 소개했었습니다. 그런데 방문하신 몇몇 분들께서 C-code로 다시 표현해달라는 이야기를 하셨는데요. 사실 포스팅을 해야겠다고 생각만 하고 미뤄두고 있었네요. 근데 결과를 보시면 정말 간단하다는 사실에 아마 경악을 금치 못하실 겁니다.^^. 일단 다시 그 보정 필터의 개념도를 보도록 하지요. 위에 있네요. 저 그림에 주석을 좀 달고 다시 시작해보겠습니다. 먼저 Temp1 intTemp1 Temp2 FilterAngle 순서로 구하게 됩니다. 그림상에 마지막부분의 FilterAngle은 단지 라디안(radian)을 degree로 표현을 다시 하는 것 뿐입니다. 결국.. 이전 1 2 다음