MAC 맥에서 설치된 ROS2와 패러럴즈에서 설치된 ROS2 연결하기
맥에서 ROS2를 설치하고, rviz2나 rqt는 맥에서 실행해서 모니터링을 하고, ubuntu에는 ssh로 접근하는 이야기를 한 적이 있습니다.
Mac에서 ROS2 humble 설치 및 원격 설정
아마도 ROS2를 사용하시는 분들이 가장 많이 사용하는 OS는 Ubuntu일겁니다. 제가 블로그에서 humble 설치를 아래의 글에서 이야기를 했었습니다. 이 글에서 ROS_DOMAIN_ID를 설정하는 이야기도 함께 했
pinkwink.kr
바로 위 링크가 그 이야기 였죠. 이번에는 맥 유저들이 많이 사용하는 패러럴즈에 설치된 우분투와 맥에 각각 설치된 ROS2들끼리의 연결을 이야기해보려고 합니다.~^^
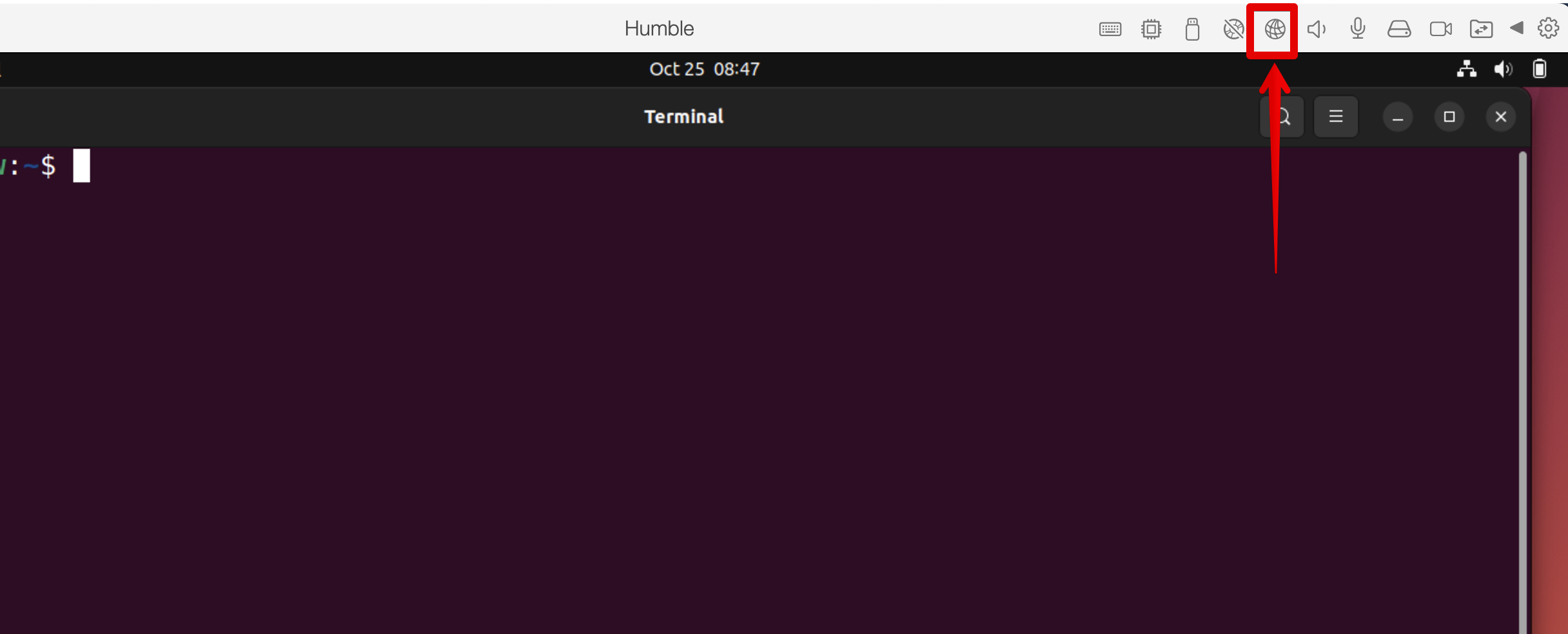
패러럴즈를 실행하고, 우분투를 설치한 후에 실행해보면 패러럴즈창에 저 인터넷 연결관련 설정 아이콘이 있습니다.
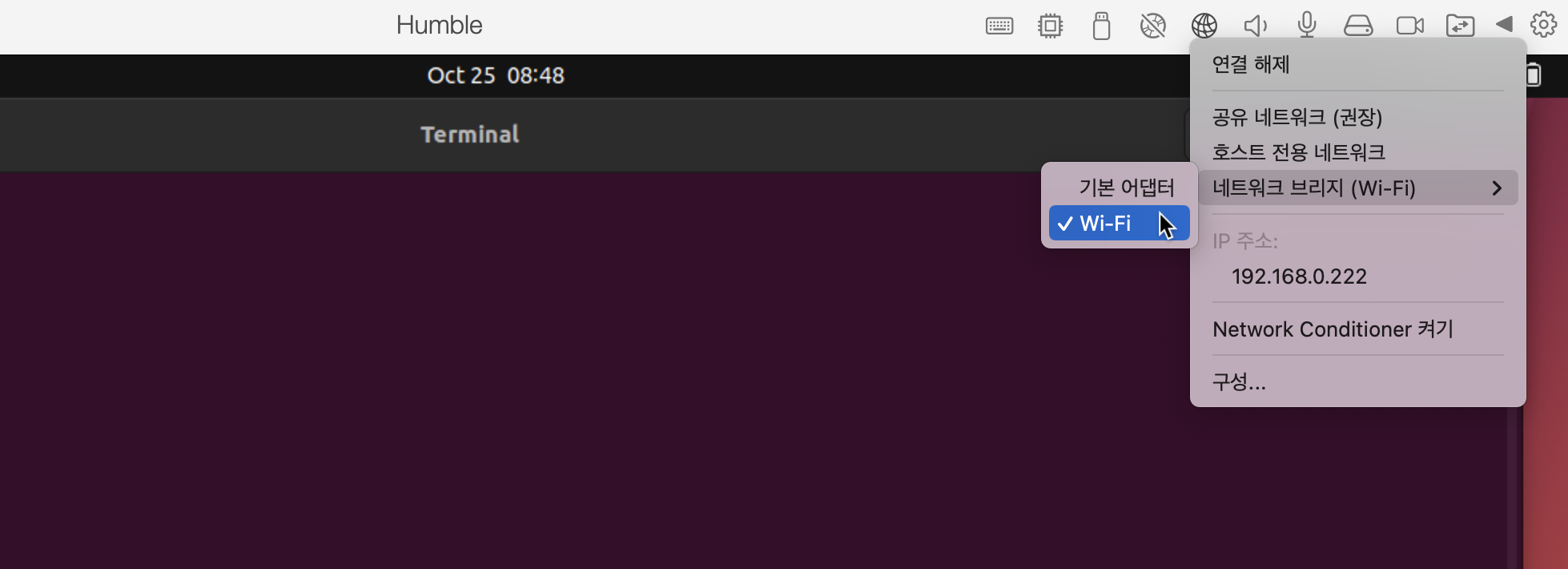
거기서 설정을 네트워크브릿지(WI-FI)로 설정하시고,

나타나는 저 아이피를 기억하시면 됩니다. 이제 맥에서 ssh로 먼저 접근해 보겠습니다.

일단 접근이 되었구요~

두 터미널에서 하나는 ssh로 접근을 했고, 하나는 Mac에서 ROS2 humble 설치를 안내하던 글에서 이야기한 대로 conda로 만들어둔 ros2라는 환경에 진입했습니다. 위 사진에서 왼쪽은 ssh로 접근한 패러럴즈에 설치한 ubuntu, 오른쪽은 나의 맥에서 설치한 ros2 환경을 부른겁니다. 여기서, 두 터미널의 ROS_DOMAIN_ID를 모두 13으로 만들었습니다. ROS_DOMAIN_ID에 대한 이야기는 아래 youtube 영상을 확인해주세요
https://www.youtube.com/watch?v=fmyC7MenEBs&list=PL0xYz_4oqpvhj4JaPSTeGI2k5GQEE36oi&index=12
이제,

새창을 열어야하는 turtlesim_node를 맥에서 실행하고, ssh로 연결된 ubuntu에서 node list를 해서보면 잘 보이는 것을 알수있습니다. 이게 사실 끝인데, 최근 제가 수업용으로 쓰는 open_cv 관련된 코드하나를 실행해보겠습니다.
https://github.com/PinkWink/opencv_tutorials
GitHub - PinkWink/opencv_tutorials: ROS2 opencv_tutorials
ROS2 opencv_tutorials. Contribute to PinkWink/opencv_tutorials development by creating an account on GitHub.
github.com
위 링크의 코드이구요.~

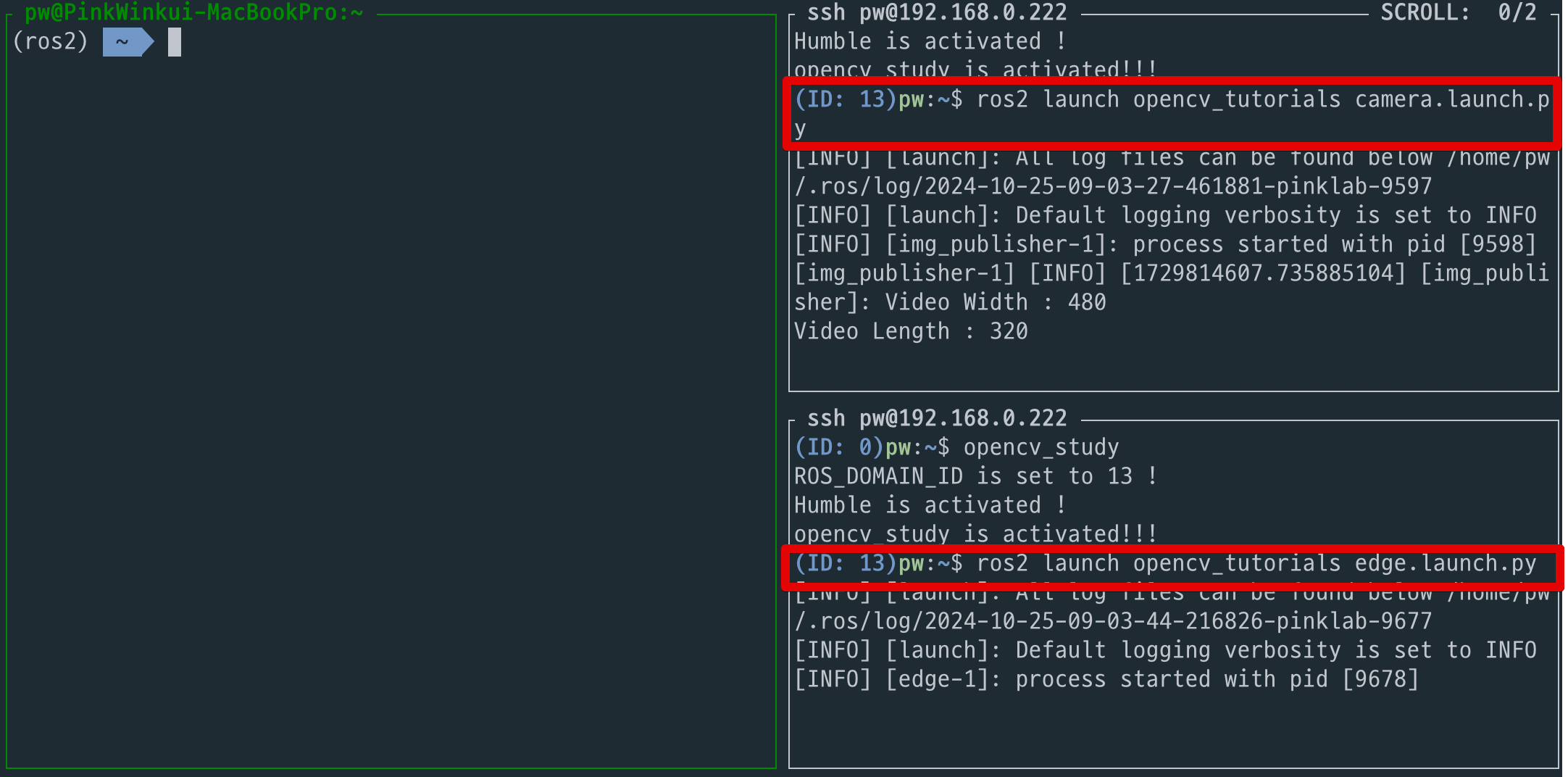
이번에는 터미널을 하나더 준비해서 왼쪽은 맥~, 오른쪽 아래위 두 개는 ubuntu(패러럴즈에 설치된)의 ROS2입니다.

위에서 이야기한 제가 하는 opencv 수업용 코드가 있는 github의 코드를 받아서 빌드한 후 alias를 설정해 두었는데 그게 위 그림의 opencv_study라는 이름입니다.
https://www.youtube.com/watch?v=i7ocNBvJWIs&list=PL0xYz_4oqpvhj4JaPSTeGI2k5GQEE36oi&index=11
Alias 설정관련해서는 위의 영상을 보시면 됩니다. 아무튼~ 이제~ 카메라를 기동하고, 살짝 edge를 따는 기능을 실행하고, 그리고~ rqt에서 그걸 관찰해보겠습니다~
이렇게 두 명령을 실행했습니다. 새창에서 확인하려면 어차피 ssh로는 안되니, 맥에 설치한 ROS2의 rqt를 가지고 와보죠~

이렇게 맥용 이쁜 디자인(^^)의 창으로 rqt가 잘 뜨는 군요 ^^