비록 배우는 학생들이지만, 44일을 집중하면 어떤 결과가 나오는지 보여주는 교육과정 - 단기 심화과정 AI 로봇 과정의 한 수강생의 결과 - 아이스크림 로봇과 배송로봇
저희 핑크랩이 진행하는 여러 교육중에 요즘 비중이 높은 교육 중 하나가 애드인에듀라는 교육기관이 진행하는 AI 로봇 과정입니다. 제자 자주 제 블로그에 로봇 관련 교육 수강생들의 성과를 소개하는데요. 그 글 중 많은 비중이 이 애드인에듀의 6개월 국비과정 부트캠프입니다. 저희는 여기서 교육안을 마련하고, 최종 목표에 맞춰 수강생들의 실력을 끌어올리는데 집중하고, 더불어 저희 핑크랩의 기술적 경험을 교육에 녹여 넣고 있답니다.
그러던 중 저희는 XYZ라는 로봇을 이용한 서비스를 만들어 직접 소비자를 만나는 일을 하시는 분들을 만나서, 44일간 단기간으로 진행하는 심화과정이라는 부트캠프에서 또 교육을 담당하게 되었습니다. 그 때 시작하던때 제가 소개글을 올린 적이 있답니다. 이때 교육의 전반적인 관리와 운영은 애드인에듀가, 멘토링과 학생들의 개발 과정은 핑크랩이, 장소와 실제 서비스에 사용하는 로봇은 XYZ가 제공을 했습니다.
엑스와이지 XYZ, 애드인에듀 그리고 핑크랩이 모여 새로운 로봇 교육을 런칭합니다. - AI 로봇 단
이번에 조금 새로운 소식을 전하려고 합니다. 바리스타 로봇과 아이스크림 로봇 등으로 최근 사업을 확장하고 있는 엑스와이지(XYZ)라는 회사와AI 로봇, 빅데이터, 메타버스 등의 분야에서 교육
pinkwink.kr
그 44일(약 9주)가 지나서 드디어 1기 졸업생이 나타났습니다.

본인들의 작품을 저렇게 요약해서 판넬로 전시도 하고


이렇게 외부에서 평가 위원분들도 모시고, 발표의 시간을 가졌습니다. 다른 팀들도 차차 소개할텐데, 오늘은 첫 발표팀을 소개하려고 합니다.
대부분의 학생들이 열심히 했답니다. 다들 좋은 성과를 거두었고, 너무나도 열심히 했으니, 이제 자신의 일들을 할 수 있는 좋은 엔지니어가 되었으면 좋겠다고 희망합니다. 저 분들이 모두 자신의 자리를 찾았으면 좋겠습니다. 이 팀은 아이스크림 로봇을 만드는 SW와 시스템을 구현했고, 물품 정리, 배송을 하는 막내(Mak-Nae)라는 이름의 주행로봇 배송시스템도 구현을 했습니다.
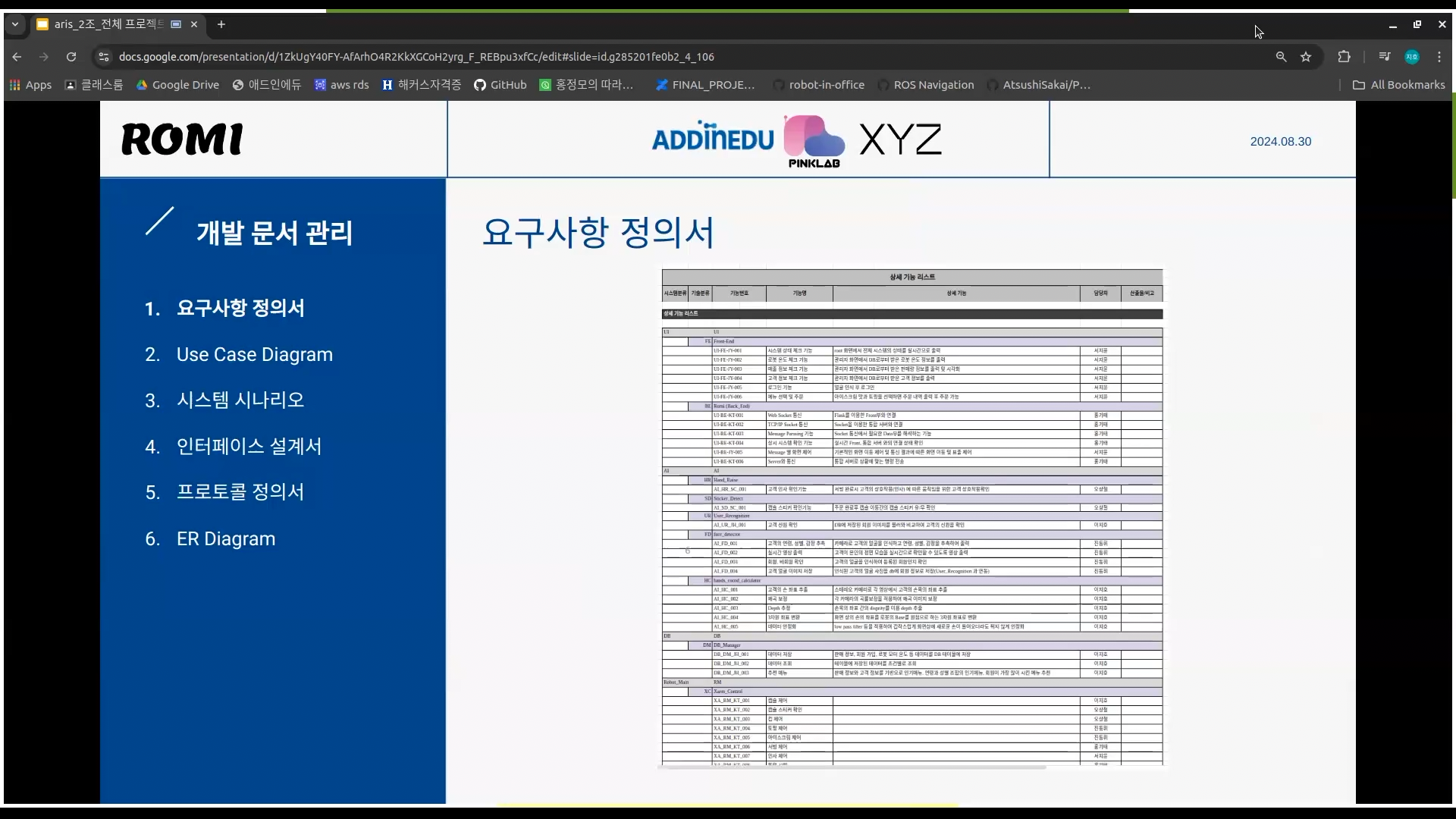
비록 자기 팀들끼리 하는 과정이지만, 요구사항 정의서도 만들고~
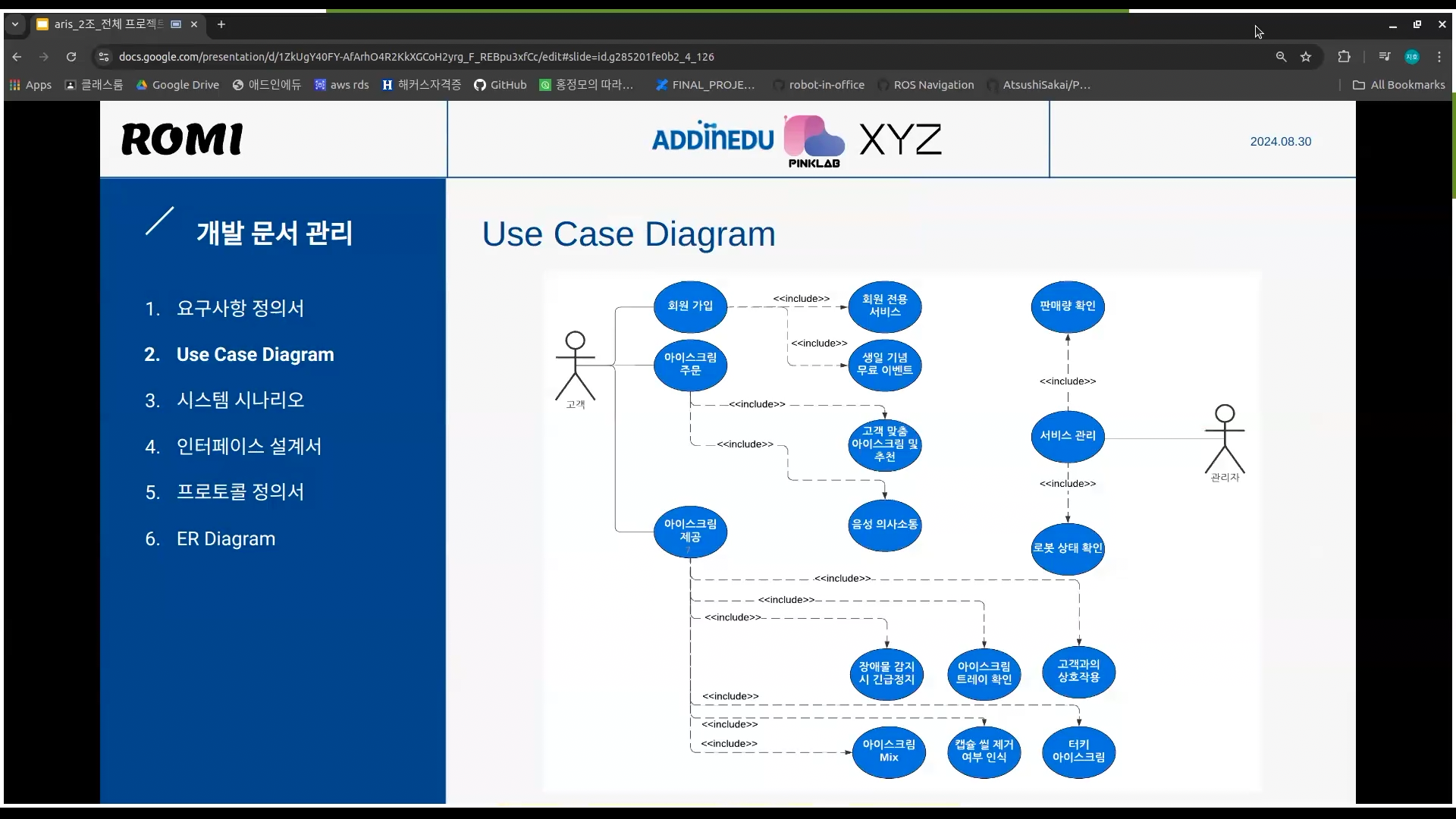
사용자의 사용상 흐름을 기술해보려고 노력도 했습니다.
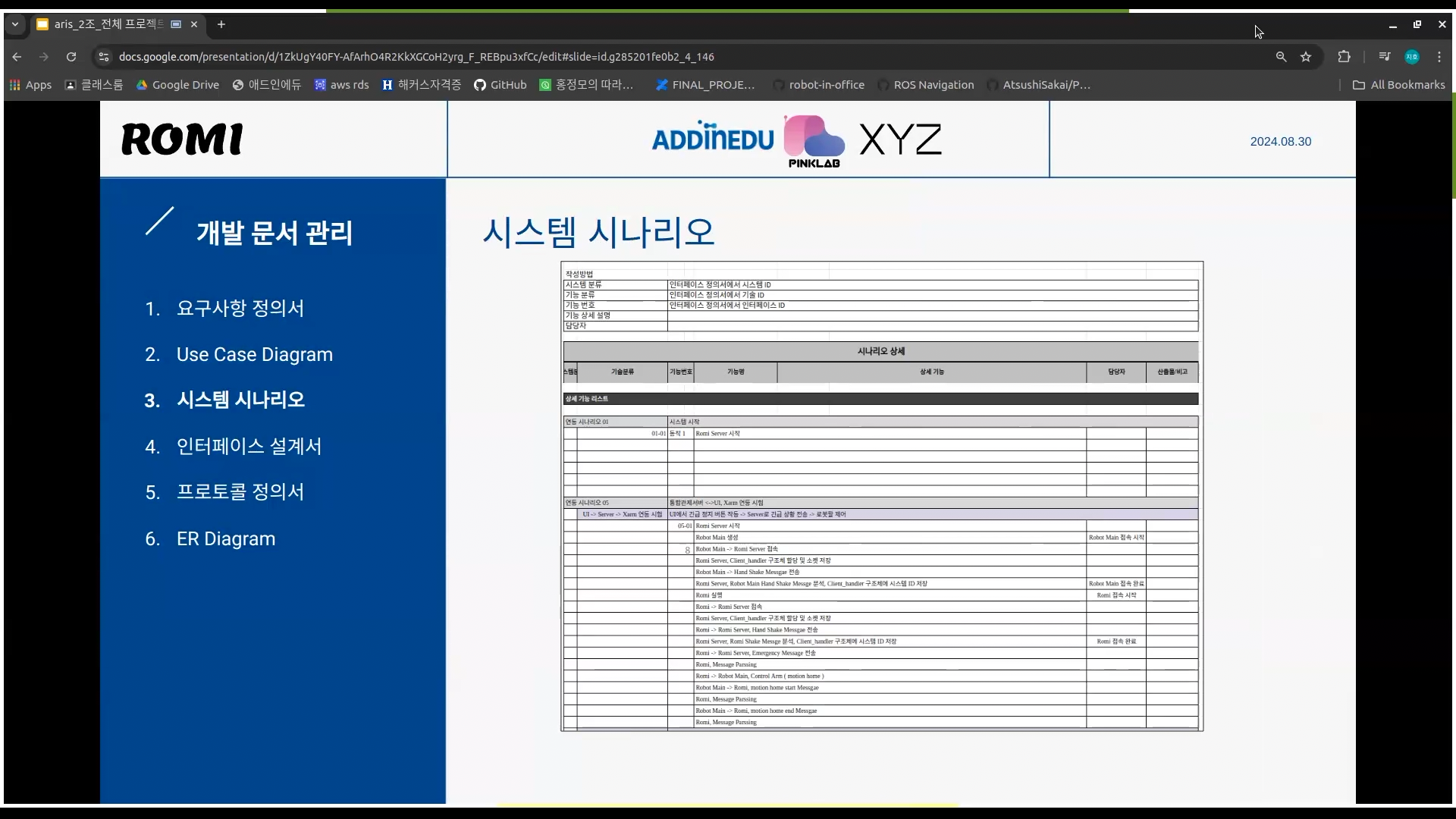
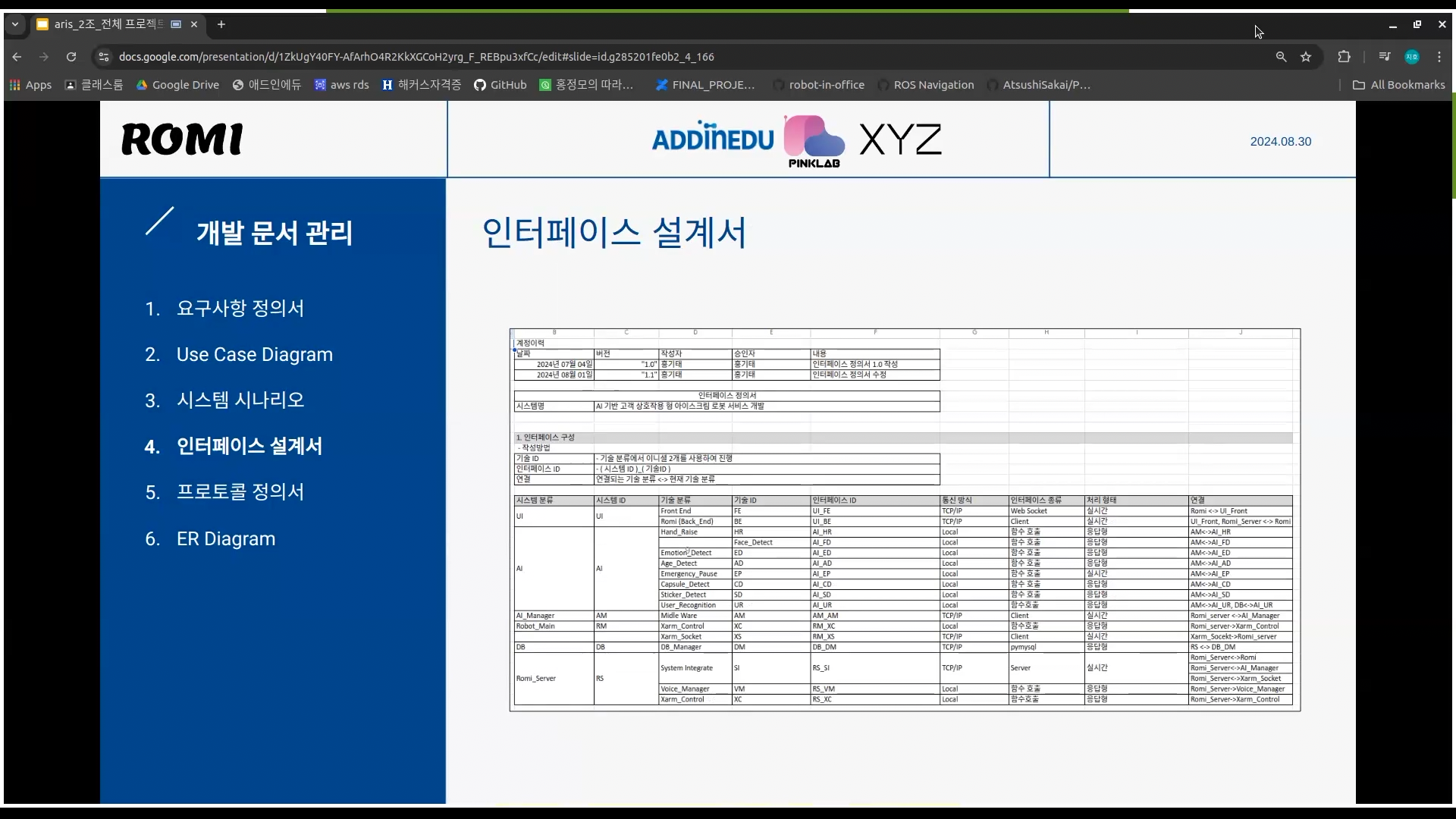
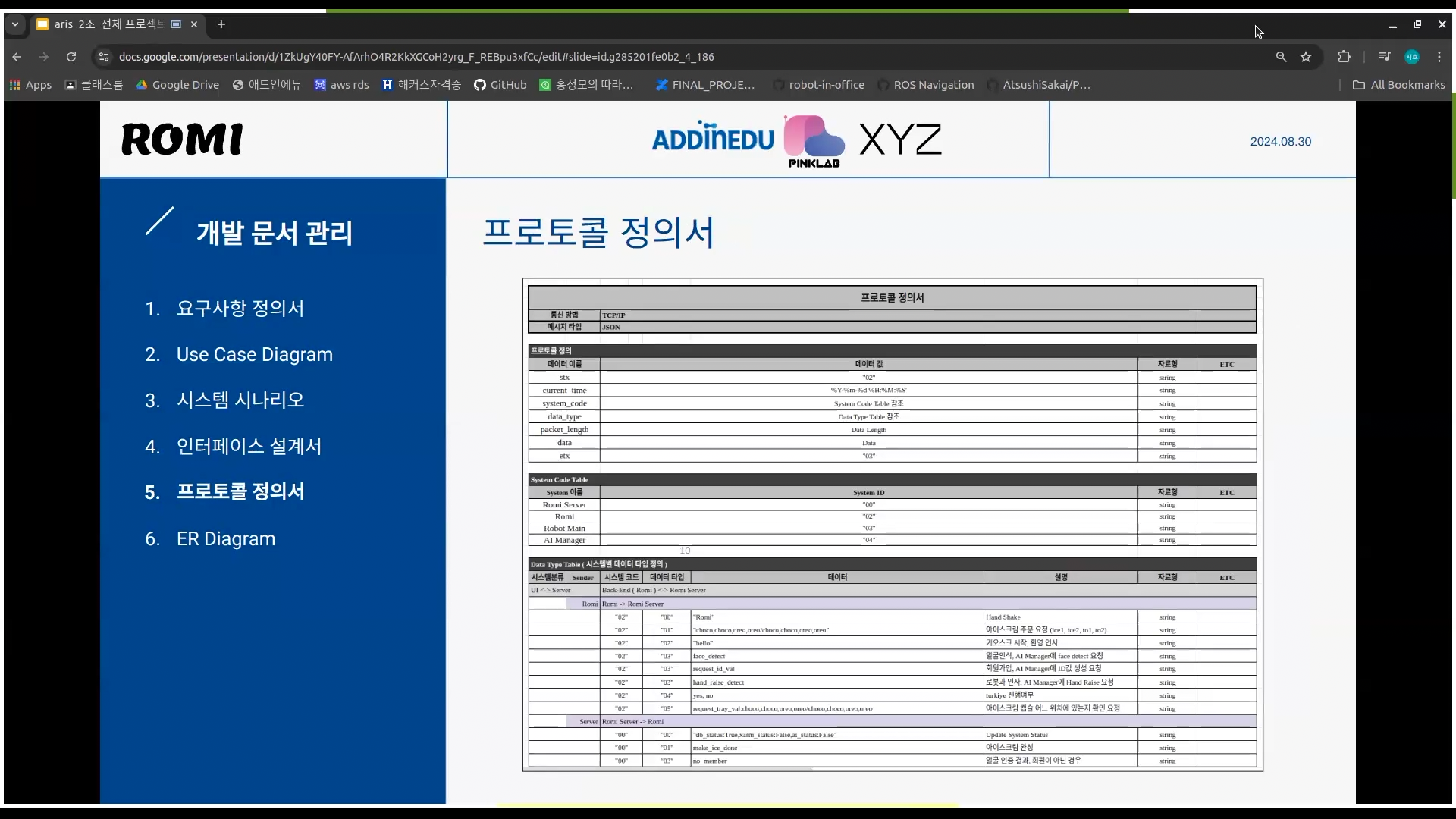
그리고, 시스템 시나리오, 인터페이서, 프로토콜 등도 모두 문서로 정리를 깔끔하게 해 두었습니다.
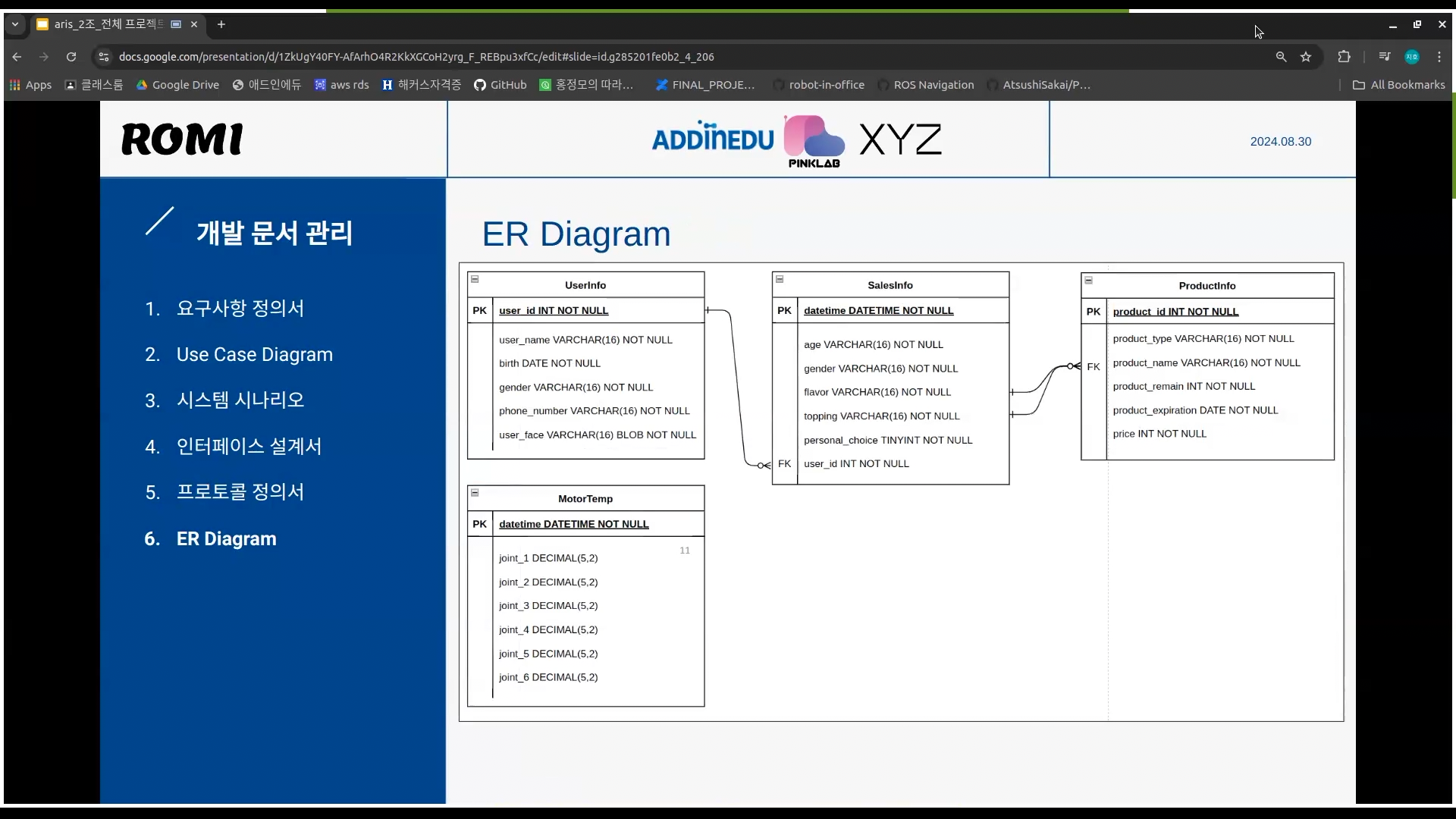
시스템의 사용상 데이터를 모두 DB에서 관리하려고 했구요.
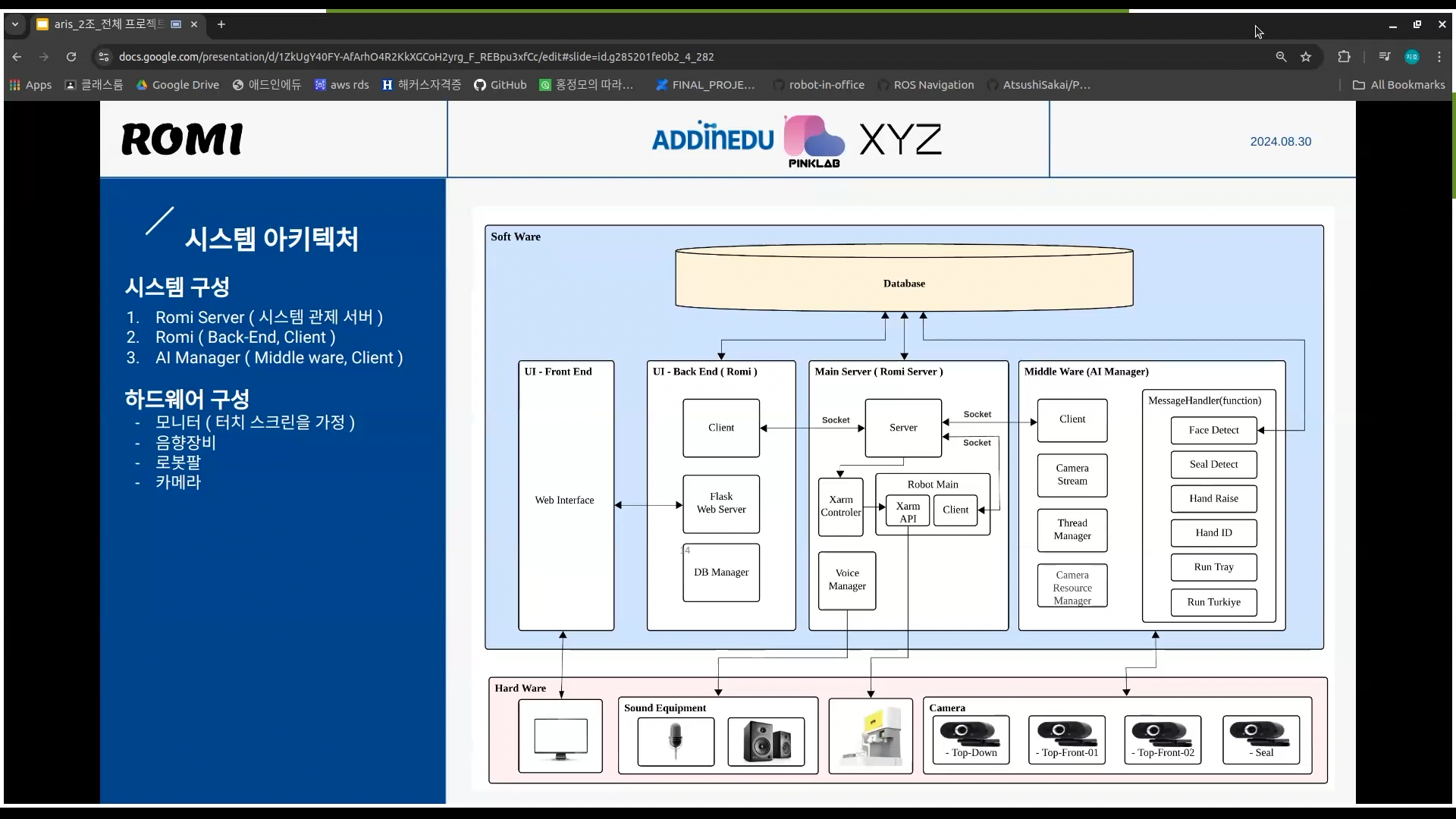
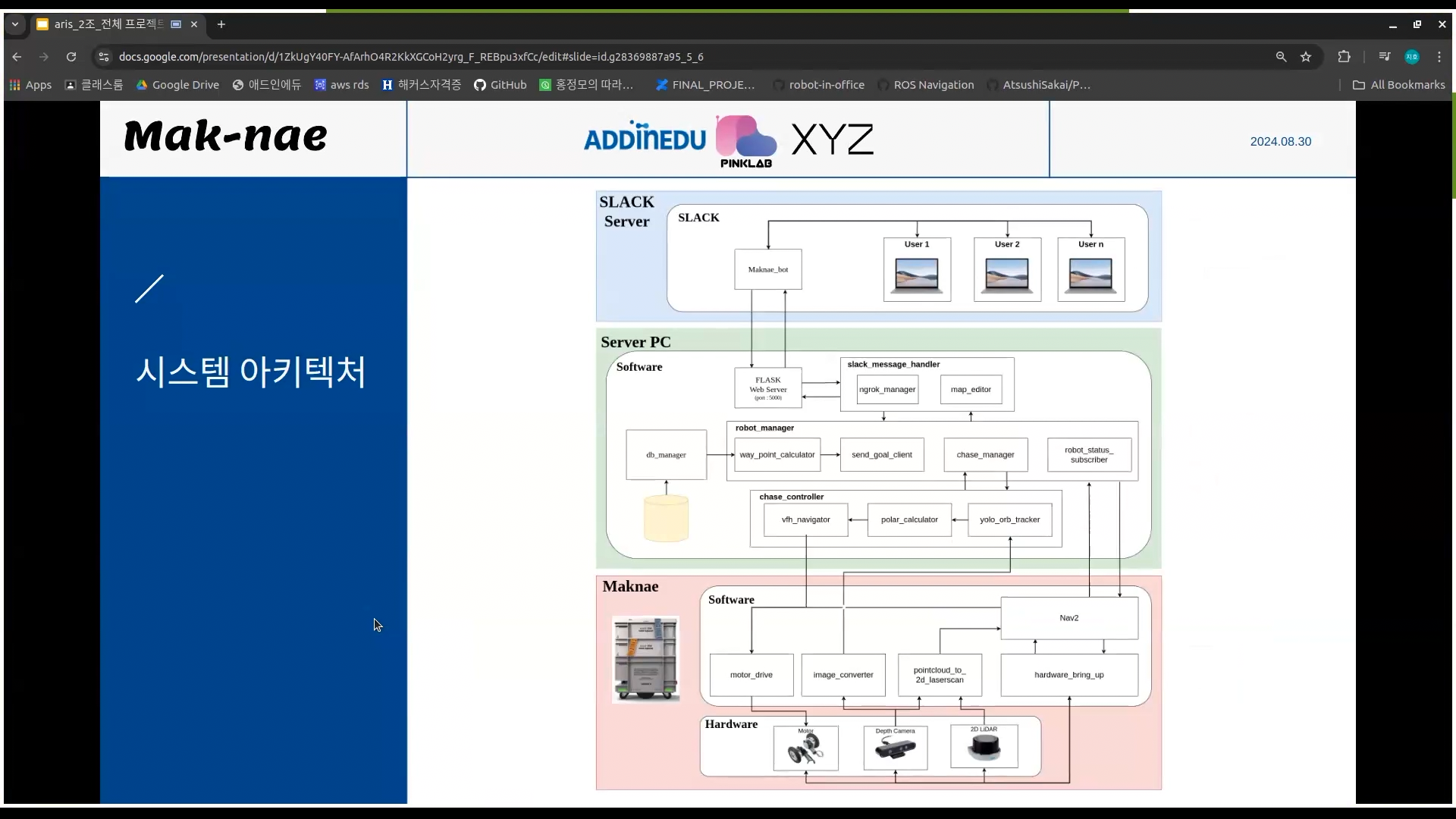
자신들이 만든 시스템의 구조도 설명했습니다. 저 그림이 이쁜가 아닌가를 떠나서 그들의 구성을 설명하려고 정리하는 것이 배우는 단계에서 중요하다고 저희는 교육때 강조하는데, 잘 따라 준것 같습니다.
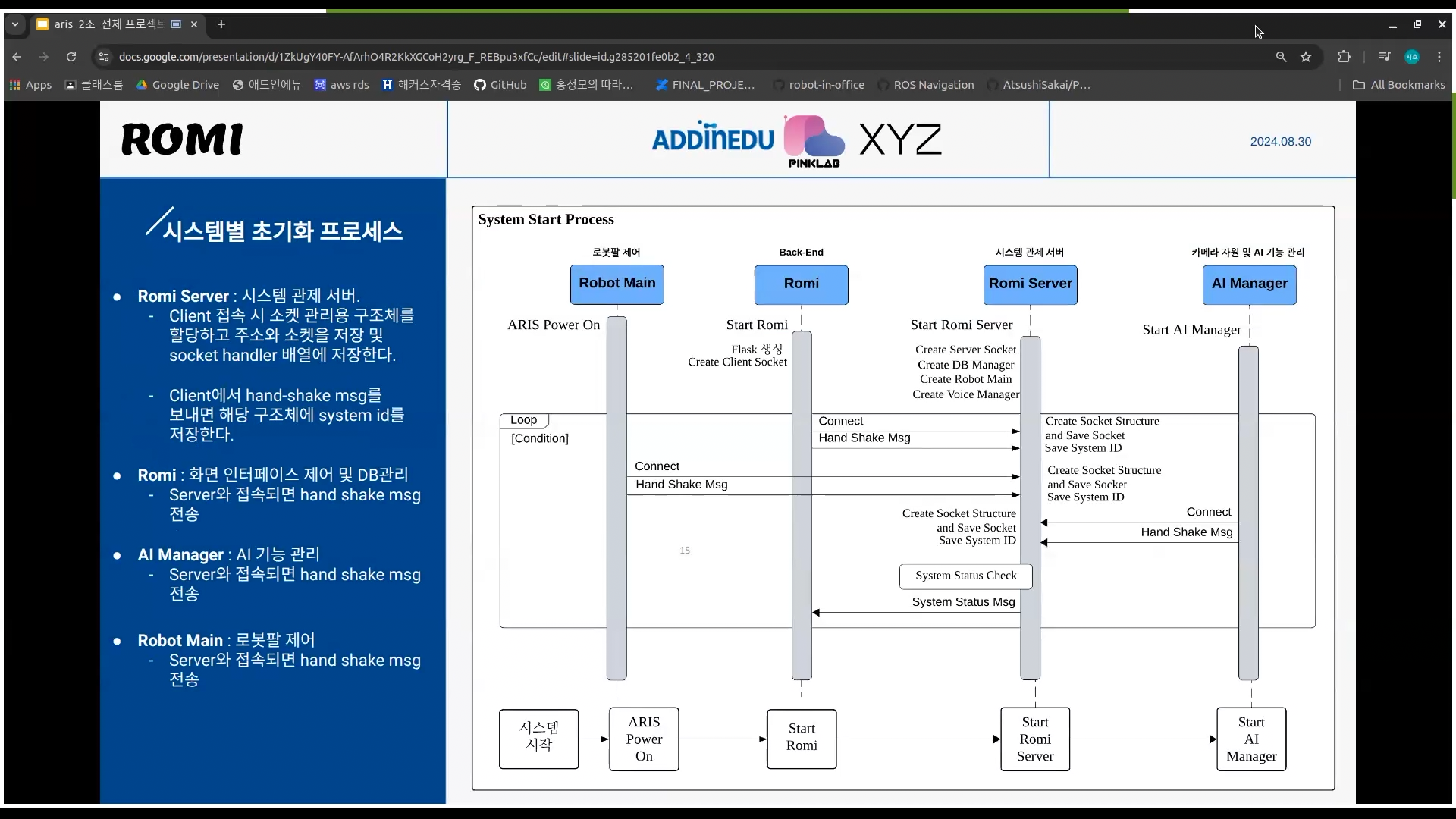
지금 위 그림은 아이스크림 로봇이 아이스크림을 만드는 과정의 흐름을 프로세서별로 정리하고 있습니다.
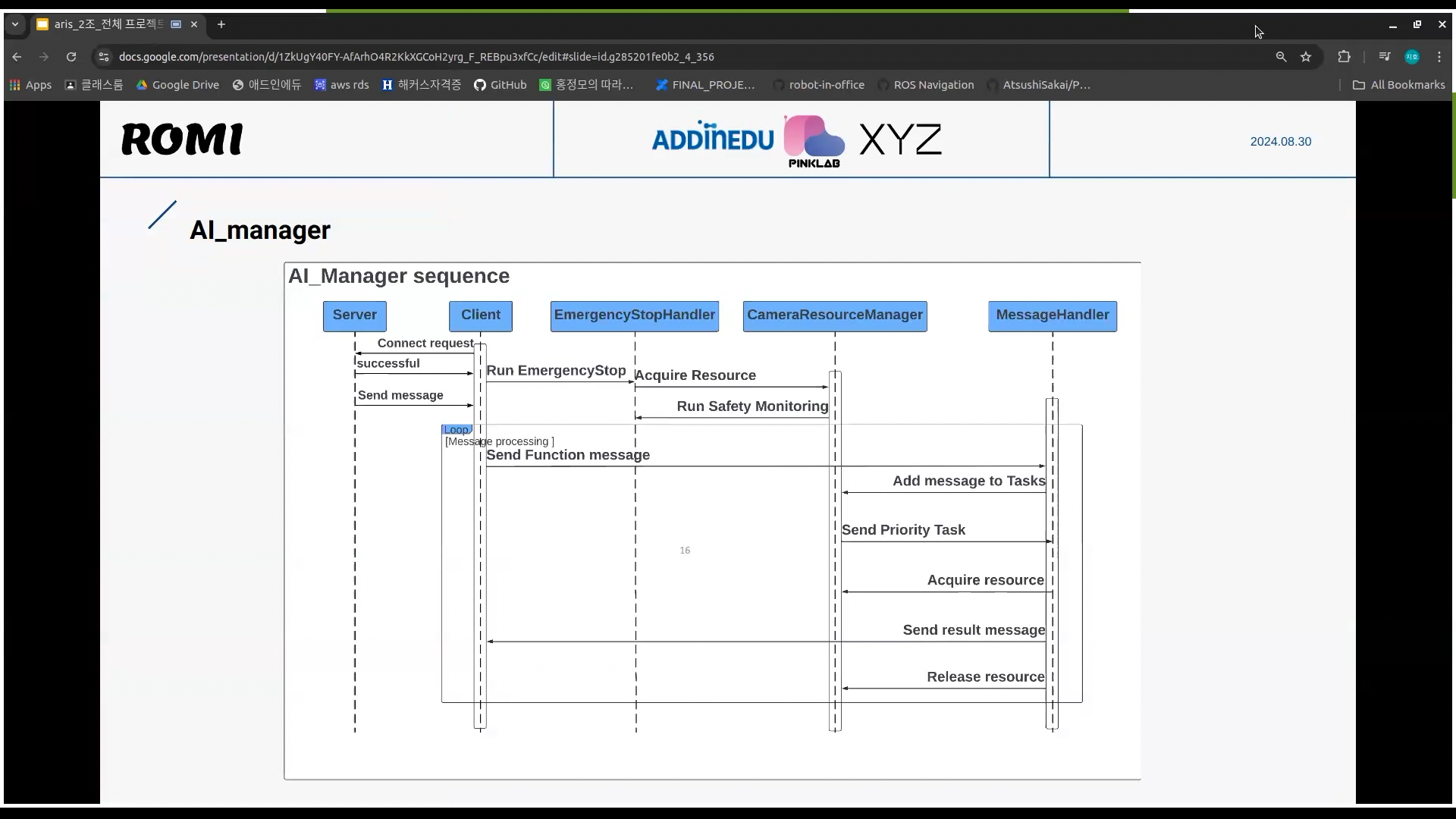
특히 강조하는 Sequence Diagram을 짧은 기간 스스로들 잘 공부해서 묘사하려 해준 것이 또 대단합니다.
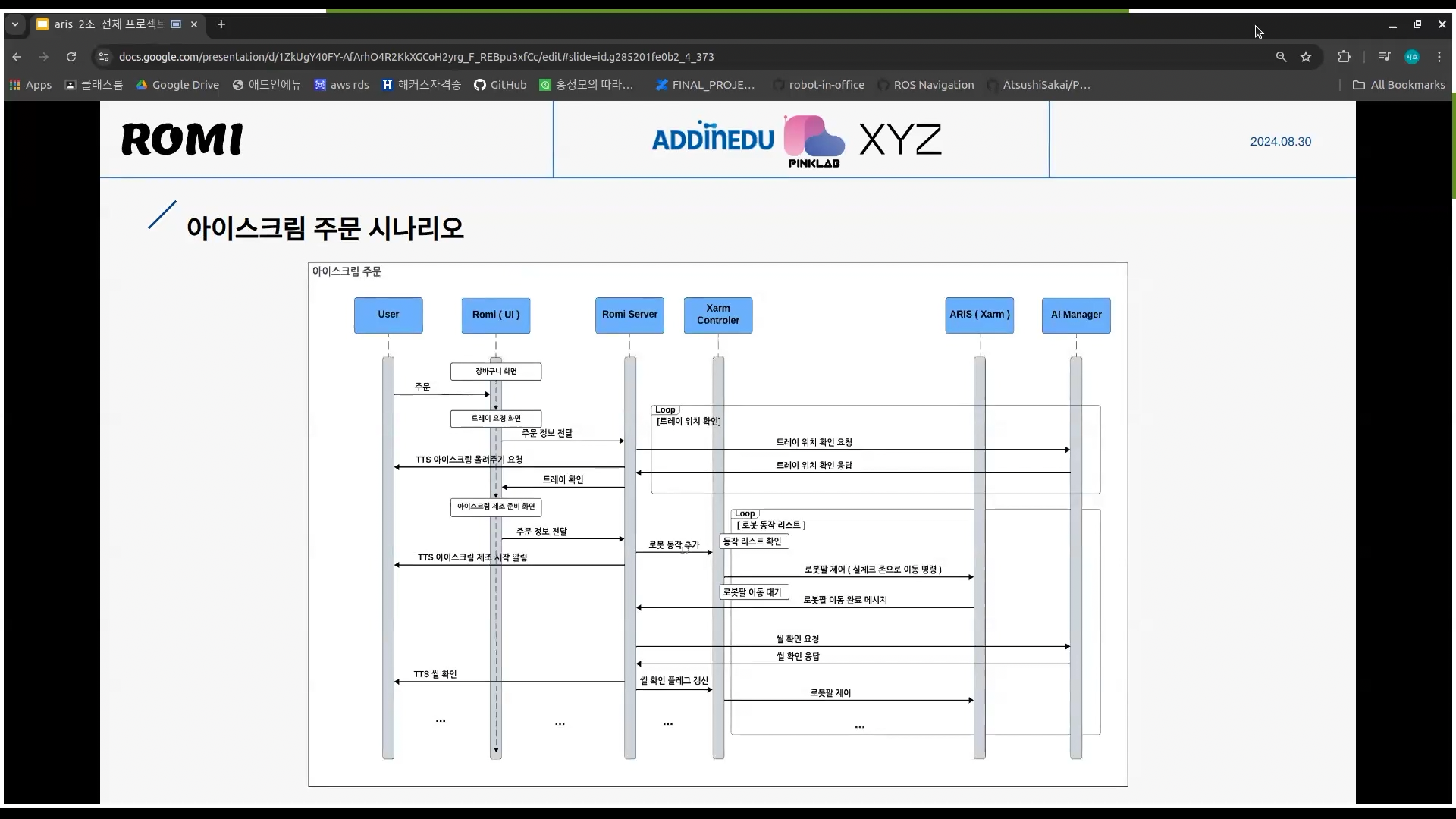
아이스크림을 유저가 주문하고 받는 과정도 또한 설계하고 구현했습니다.
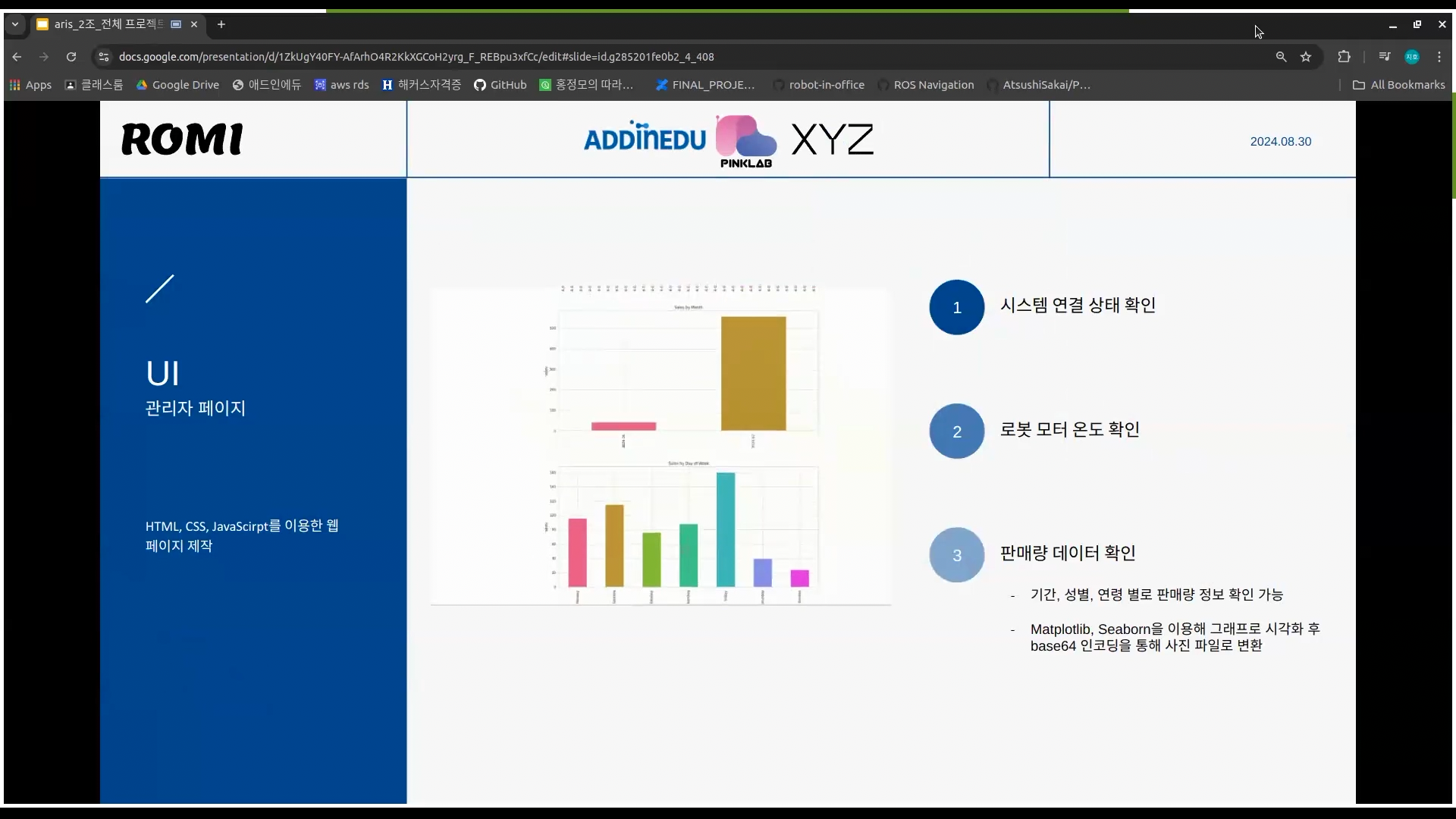
유저 GUI 화면도 잘 구현하고, 관리자 화면도 구현해서, 로봇의 상태를 잘 피드백 받으려고 노력했습니다.
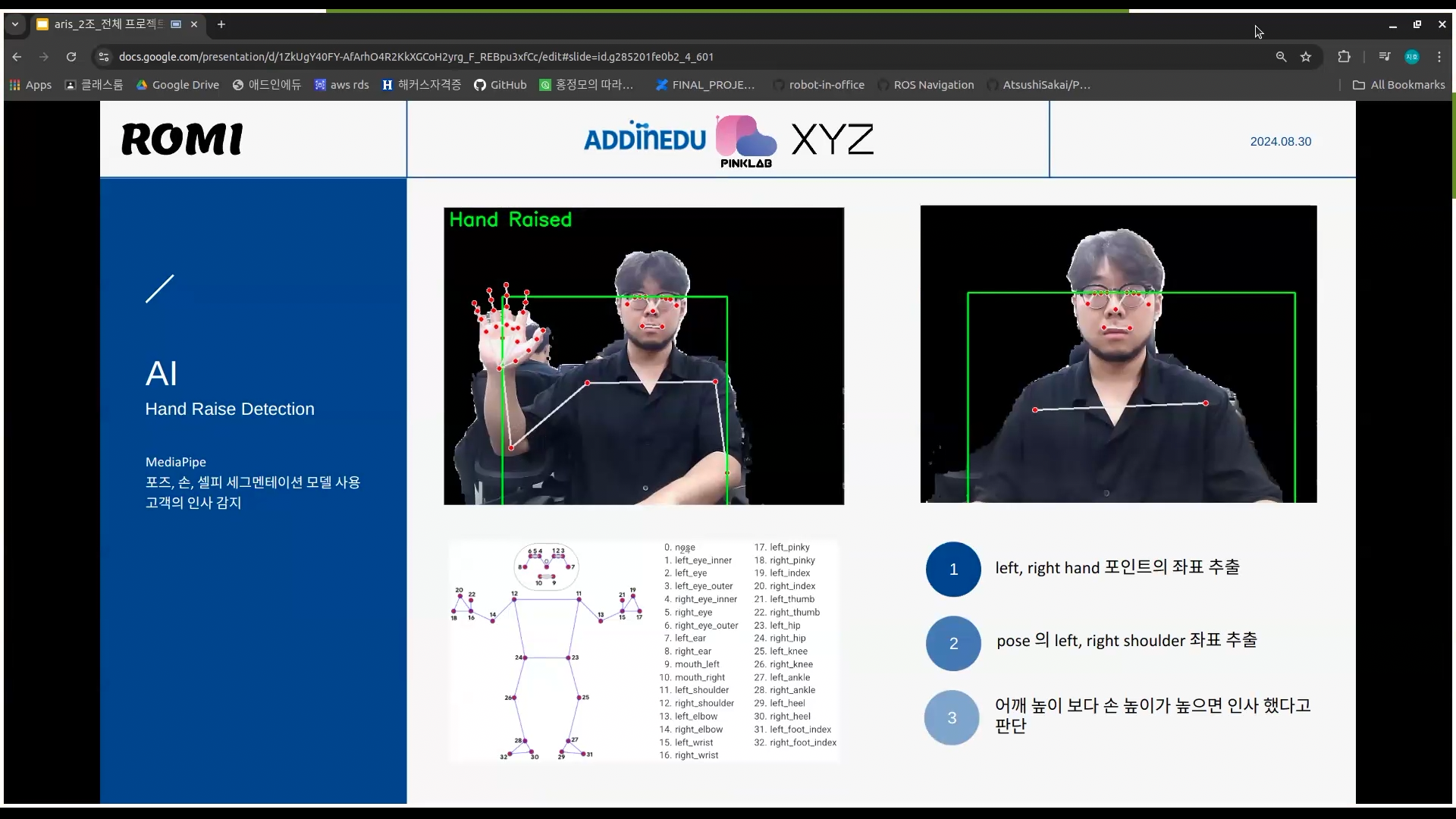
그 중에 약간의 효과를 위해 제스쳐를 인식해서 간단한 손동작을 사용자 입력 도구로 사용하려 했습니다. 동작하는 최종 영상은 글 제일 마지막에 공유한 발표 링크를 통해 확인하시면 됩니다.
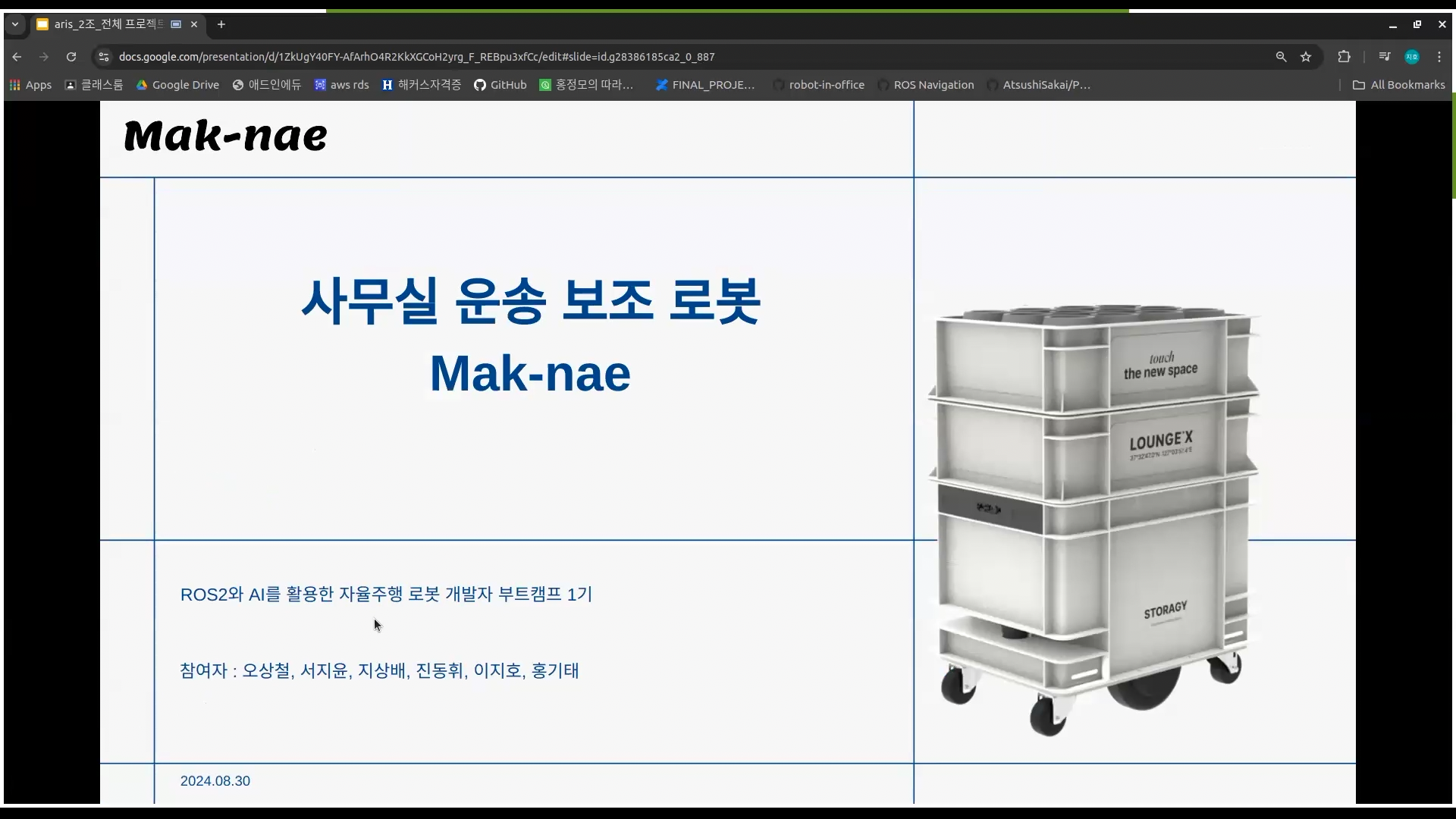
이번 심화과정은 총 44일의 과정인데, 반반 나눠서, 절반은 로봇팔을 이용한 프로젝트를 수행하고, 또 하나는 주행로봇을 이용한 프로젝트를 수행했습니다. 이번에는 주행로봇을 이용한 과정입니다.

로봇을 호출해서, 쓰레기도 주고, 음료도 배송받고, 서류도 배송 시킬 수 있는 그런 컨셉입니다.
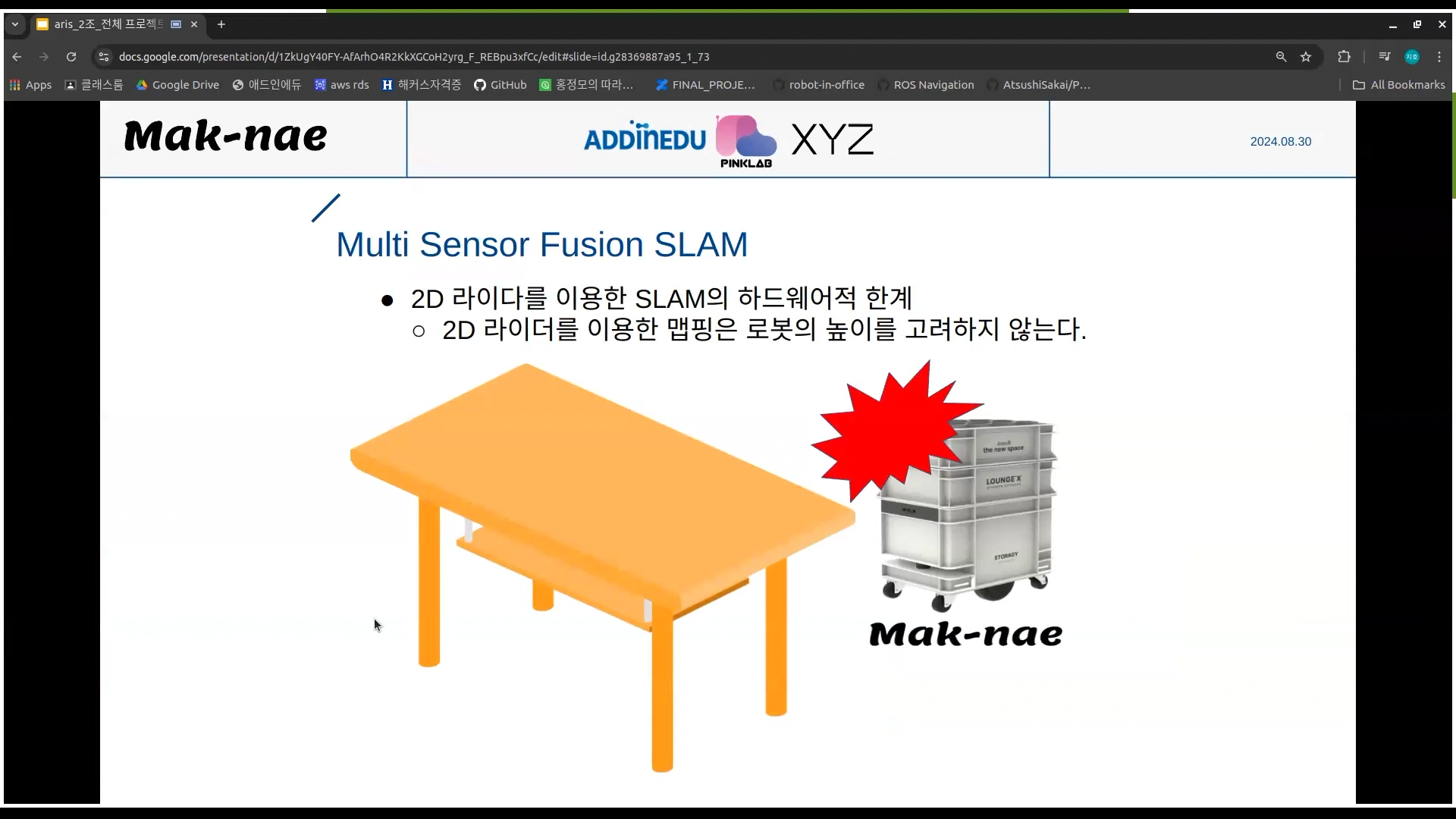
이 팀의 기술적 노력이 들어간 부분이 하나 있는데요.
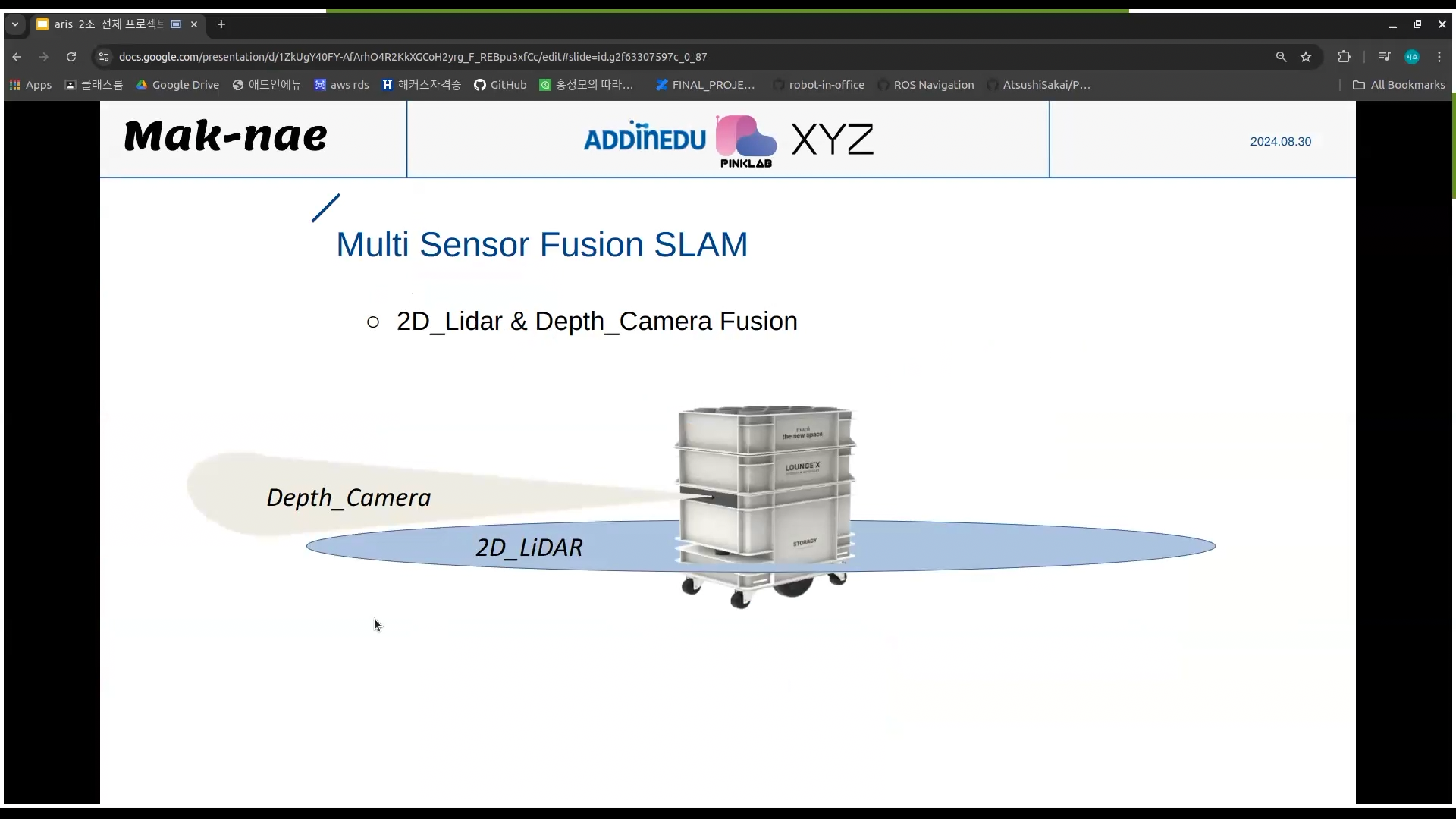
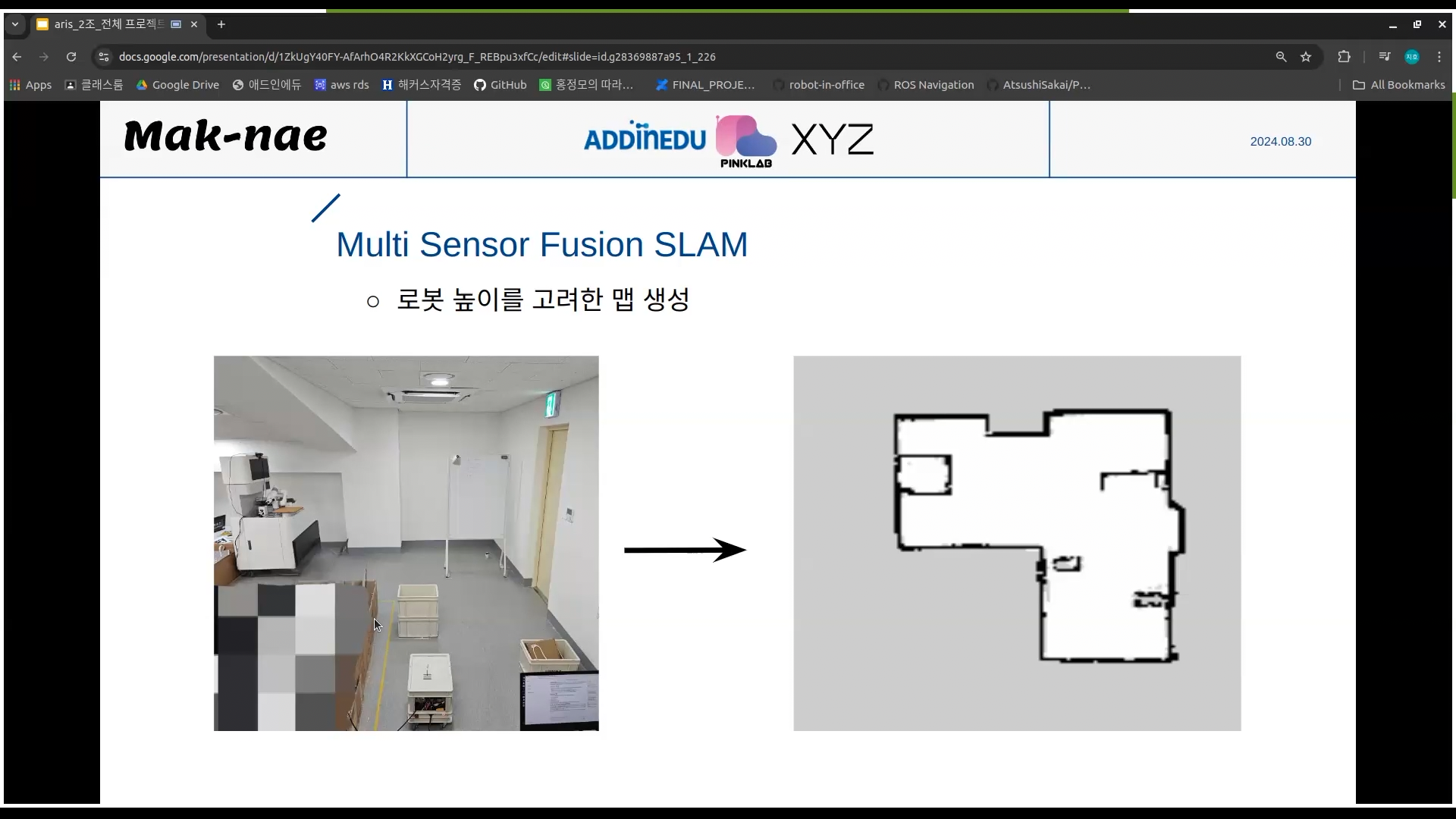
이 팀이 지급 받은 로봇은 위 그림처럼 라이다는 바닥부분에 가깝게 있는데, 이것 때문에, 다리만 있고, 높이가 있는 사물의 경우 걸릴 수 있습니다. 그래서 라이다보다 높에 있는 뎁스카메라를 활용해서
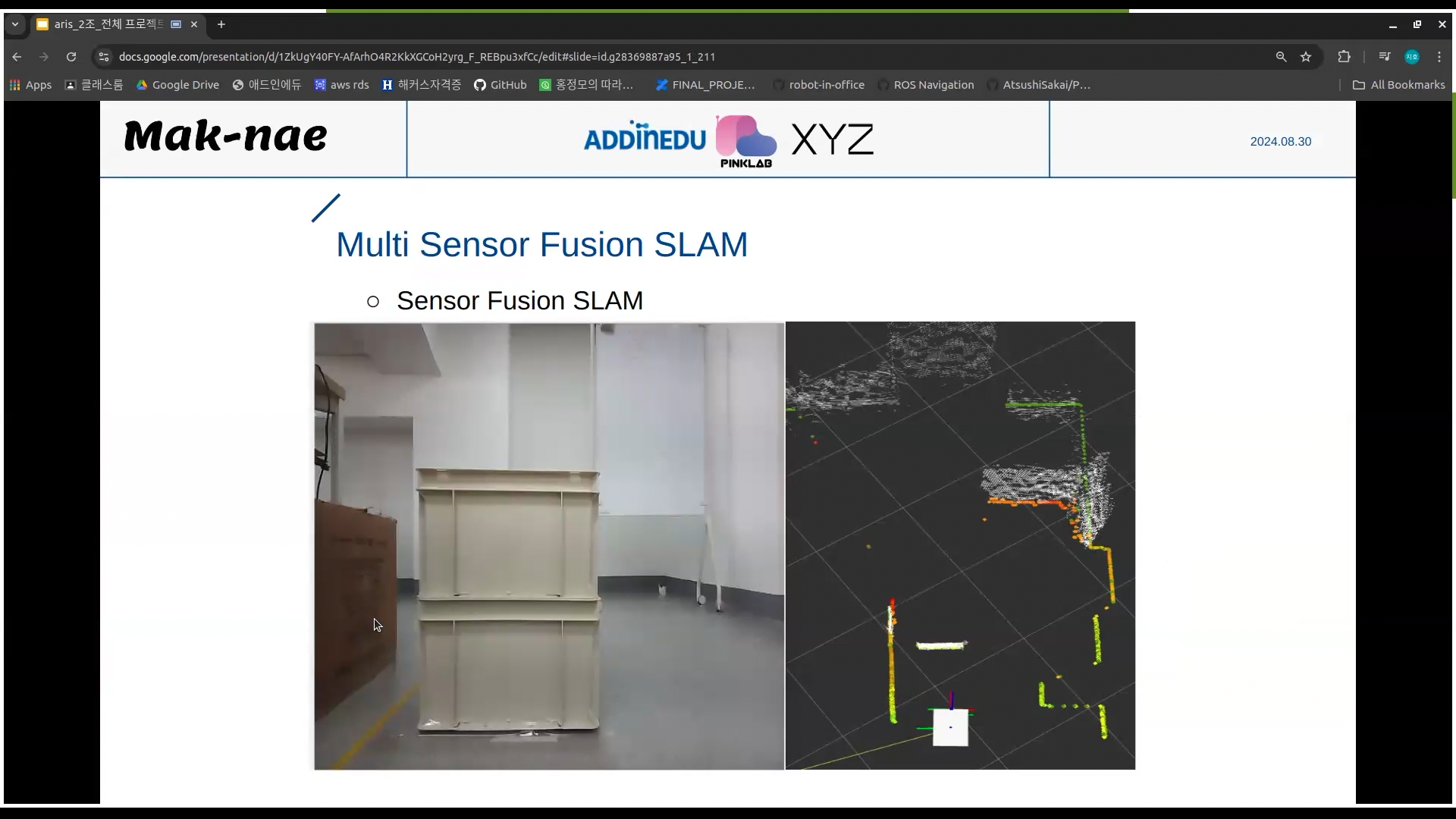
아래 그림의 외쪽처럼 라이다보다 상단에 있는 장애물도 맵을 만들때 반영하도록 한 것입니다.
그리고 나서 ROS2가 제공하는 nav2를 활용해서 기본적인 주행을 만들었지만, 또 세부적인 미세조절은 또 다른 시나리오를 사용하기도 했습니다.
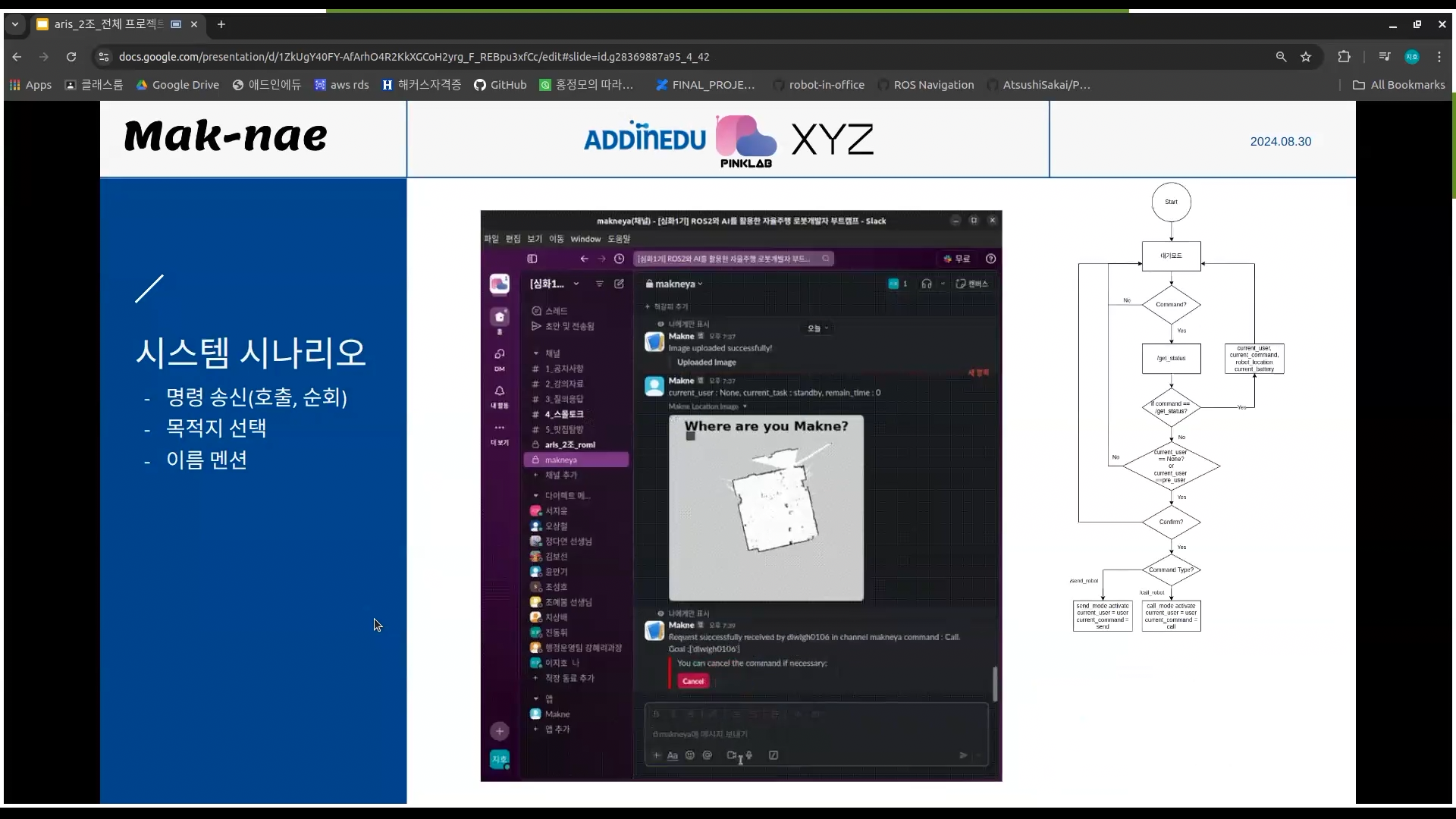
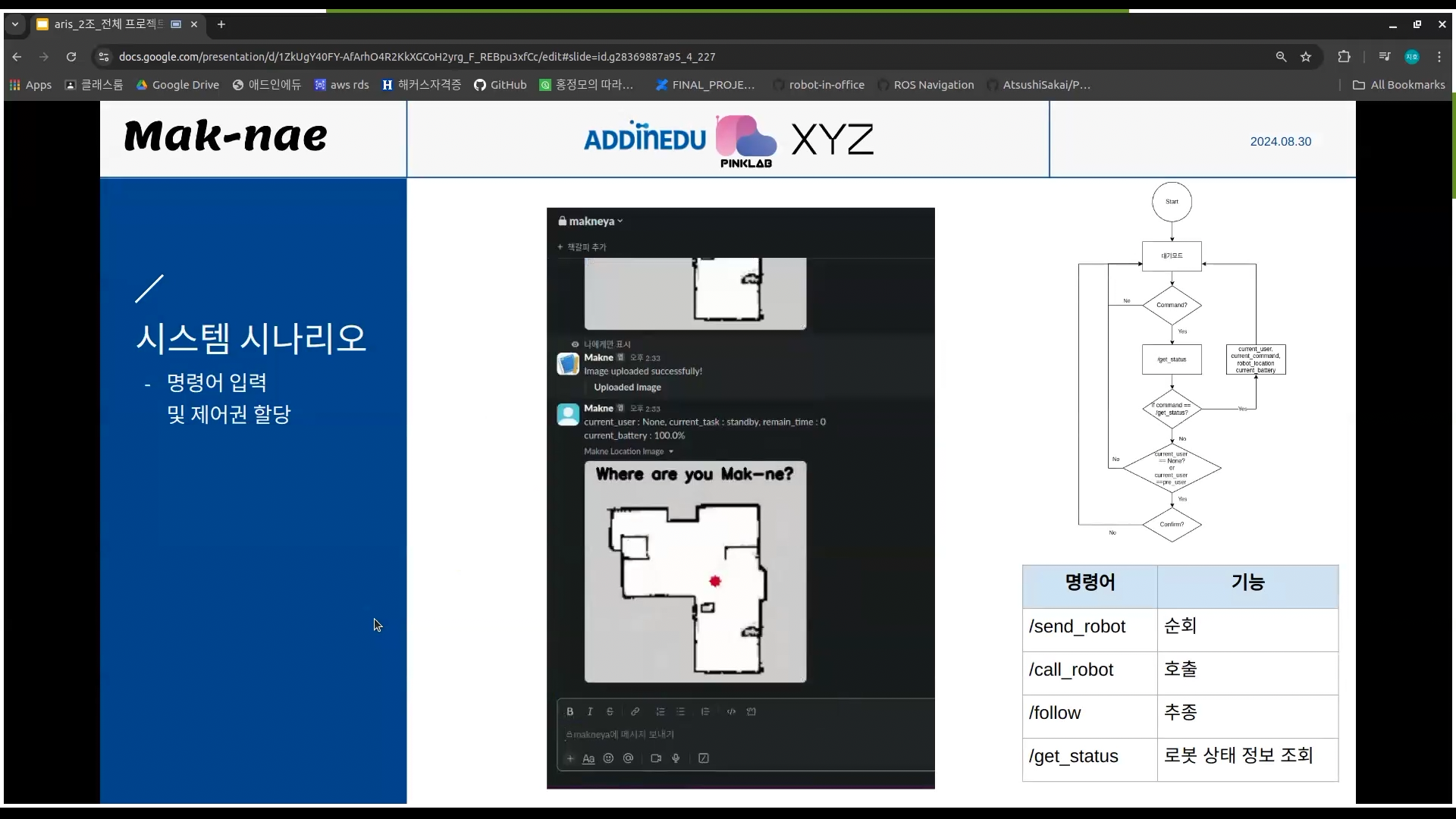
또 하나 이 팀이 구현한것은 slack이라는 메신저를 통해 로봇, 혹은 서비스를 호출하거나 로봇의 상태를 확인할 수 있도록 한 것입니다.
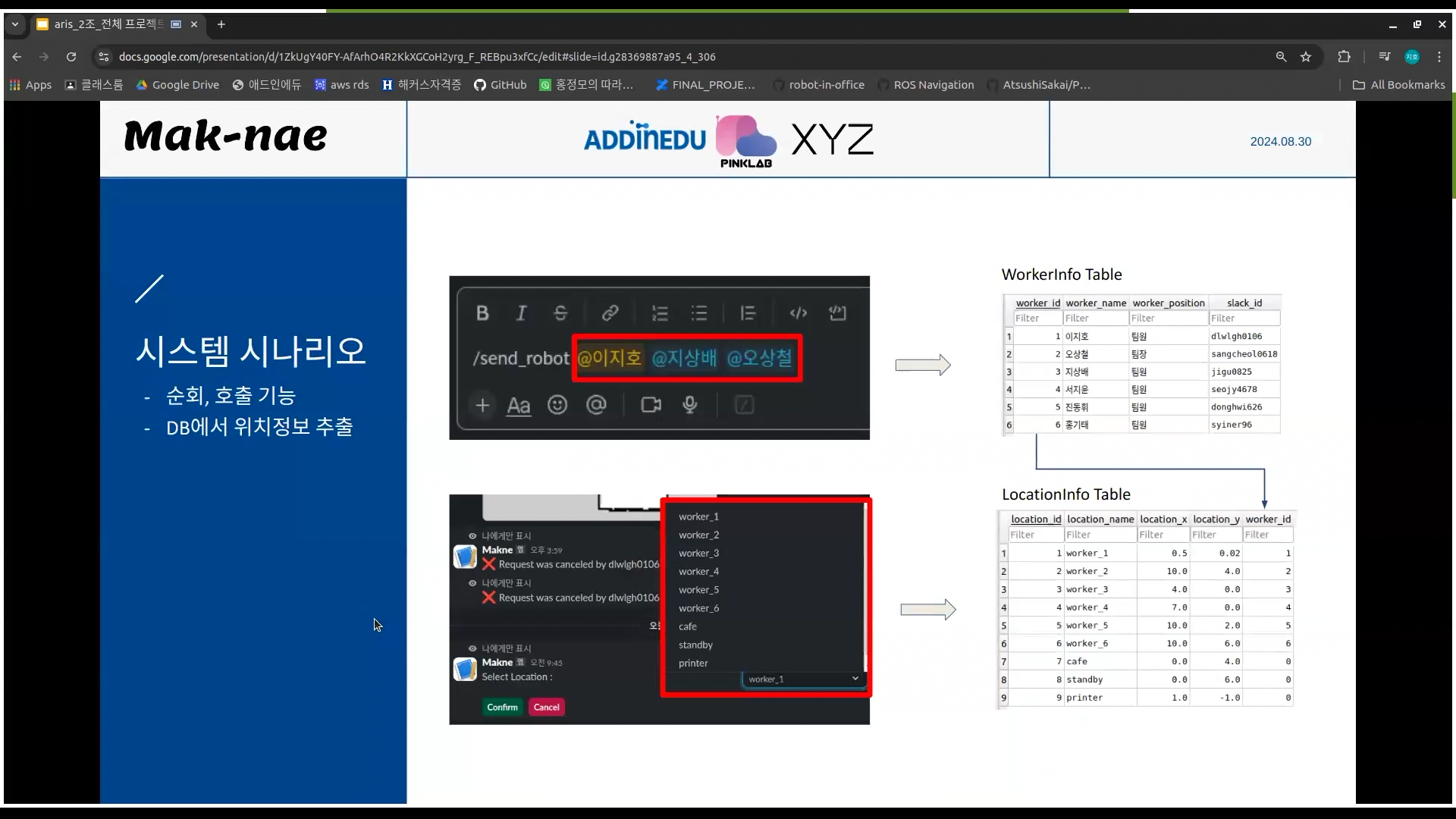
그래서 슬랙과 로봇으로 연결되는 구조도 구현하게 된 것이죠. 이 팀 및 또 다음에 소개할 다른 수강생들이 모두들 좋은 취업의 기회를 가졌으면 좋겠습니다.^^ 현재 이 글이 작성된 시점 기준으로 2기를 모집중입니다.
현업 엔지니어와 함께하는 AI로봇 개발
oopy:slide
ros2-44.oopy.io
지금 소개한 팀의 최종 발표 영상도 공유를 합니다~~~