농업용 스마트 로봇에 도전하는 스마트 축사용 로봇
이 글은 저희 핑크랩이 애드인에듀의 의뢰를 받아 진행하는 6개월 KDT 과정인 AI 자율로봇 과정의 한 수강생팀의 파이널 프로젝트를 소개하는 글입니다.
팀 이름이 왓소(WHAT소)입니다. ROS2를 활용한 스마트 축산 보조 서비스가 정식 명칭입니다.^^
파이널을 할 때 많은 학생들이 자기들이 배운 혹은 자신있어 하는 기술을 좋은 주제에 버무리고 싶어 하는데요. 이 팀도 그런 고민을 많이 한 것 같습니다.
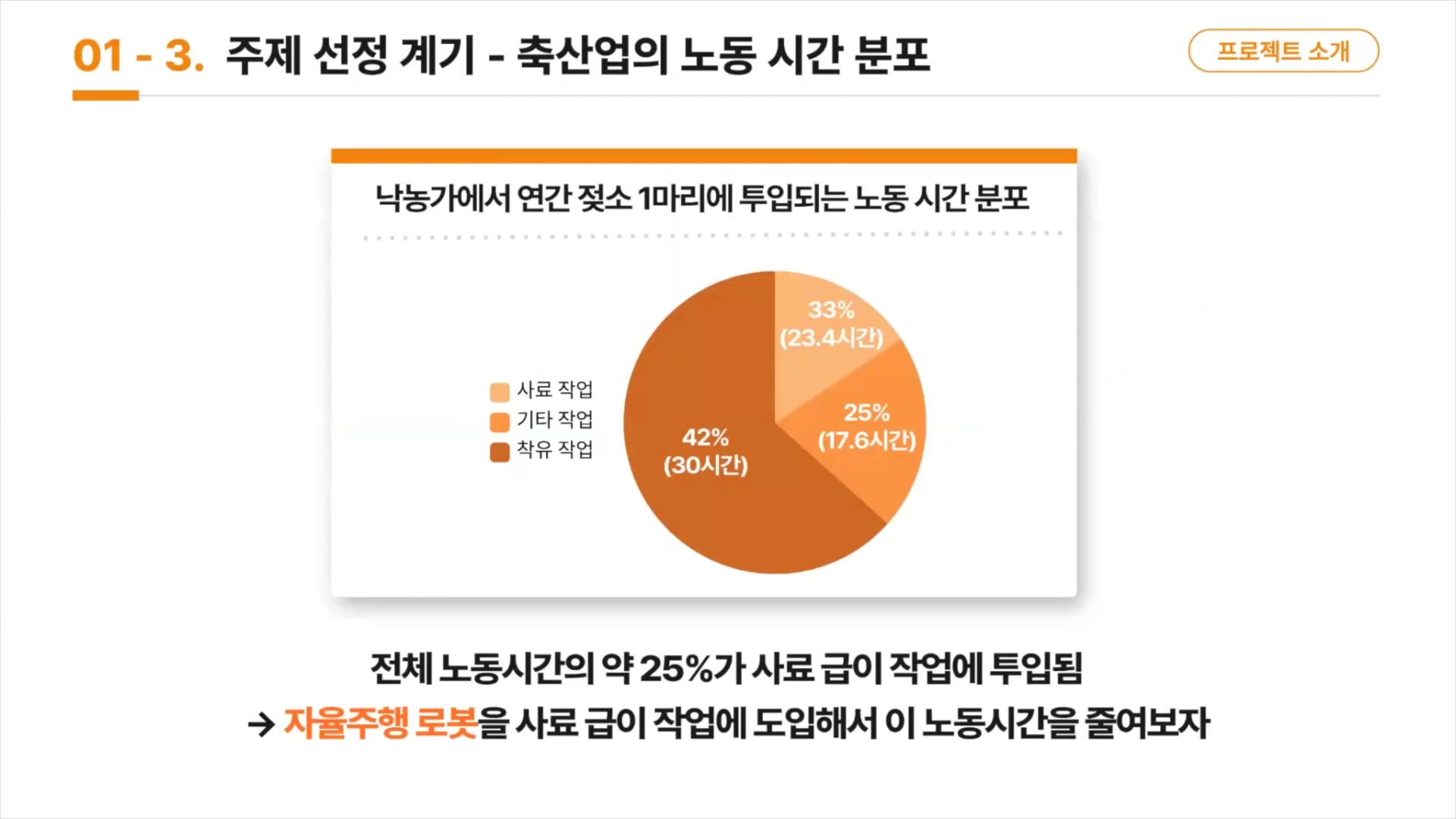
그래서 이들이 본건 축산업계입니다.


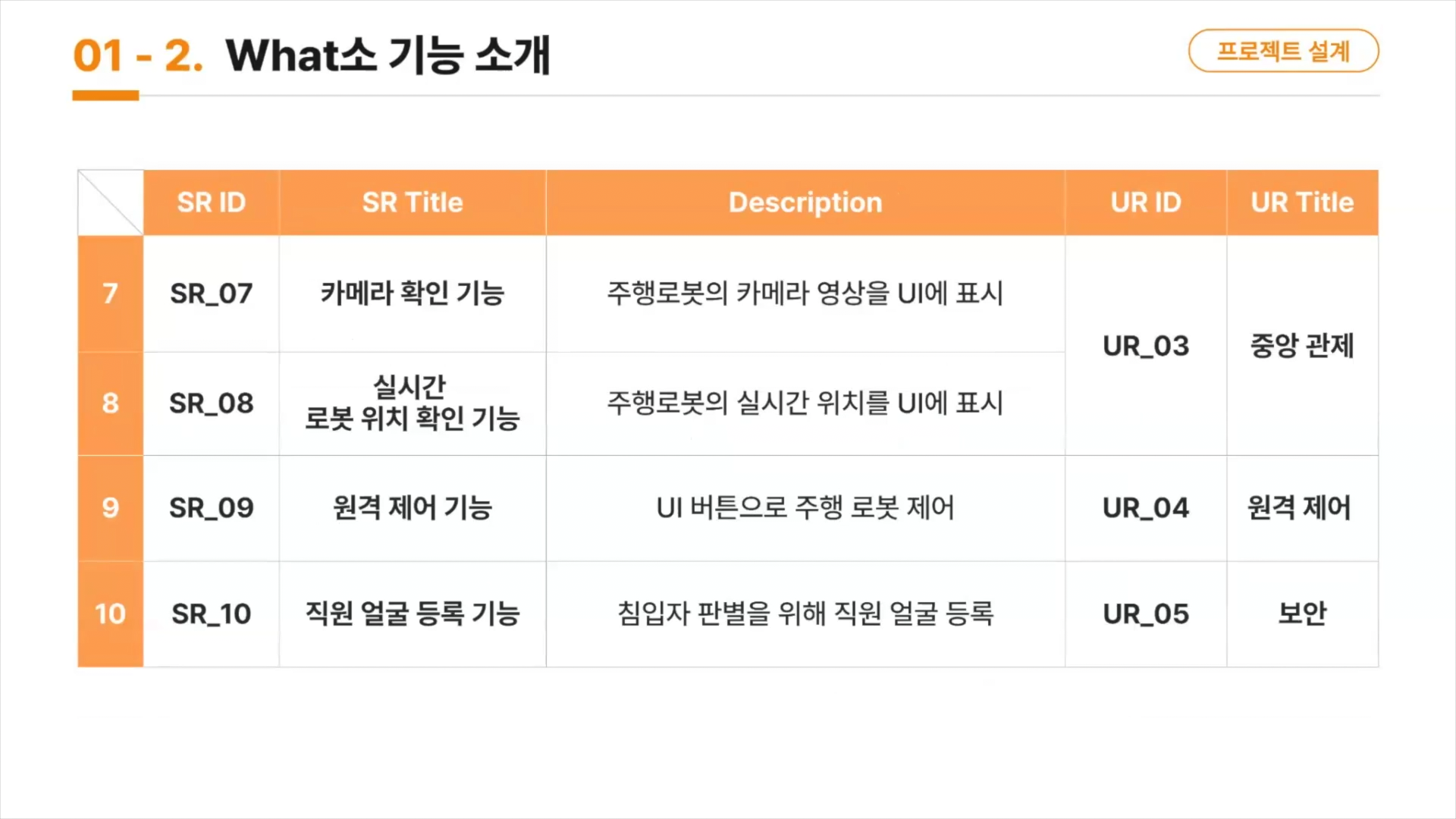
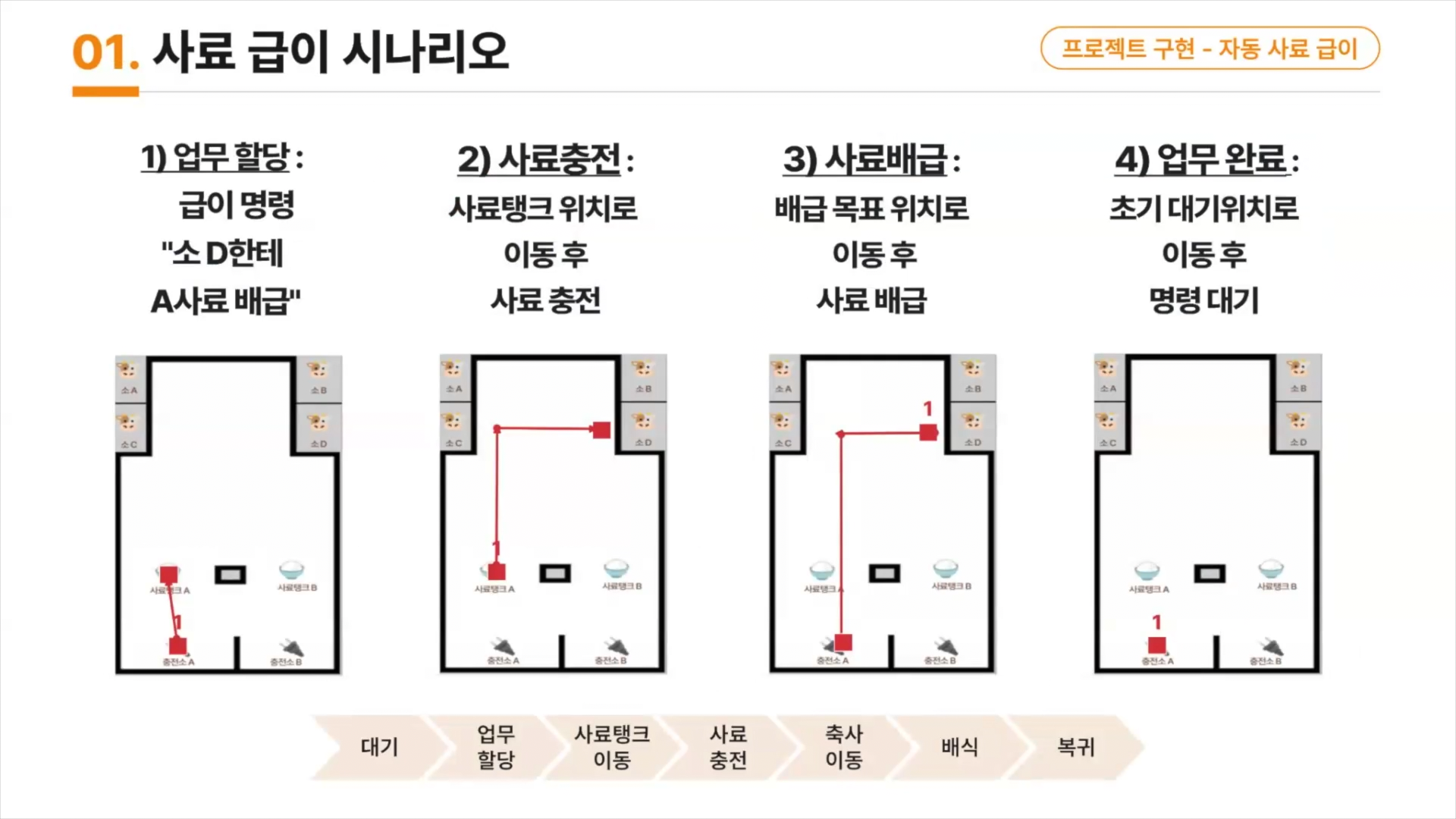
필요한 기능을 도출해보면서, 다양한 시나리오를 상상했습니다.
우리가 수업때 사용가능했던 로봇과 장비가 살짝 자원의 한계가 있어서 얼마 없지만, 그래도 주어진 환경에서 최선을 다한것 같습니다.
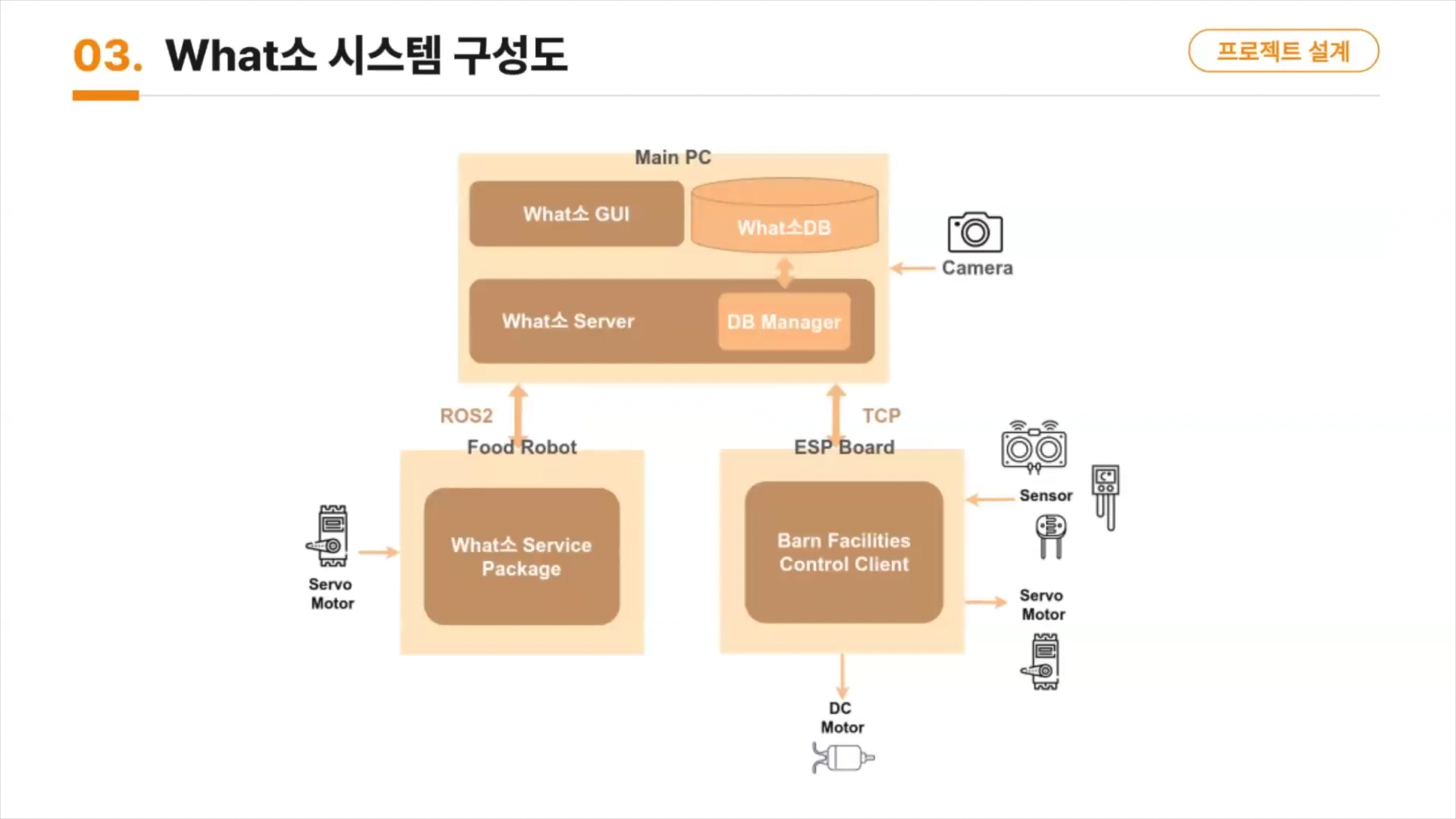
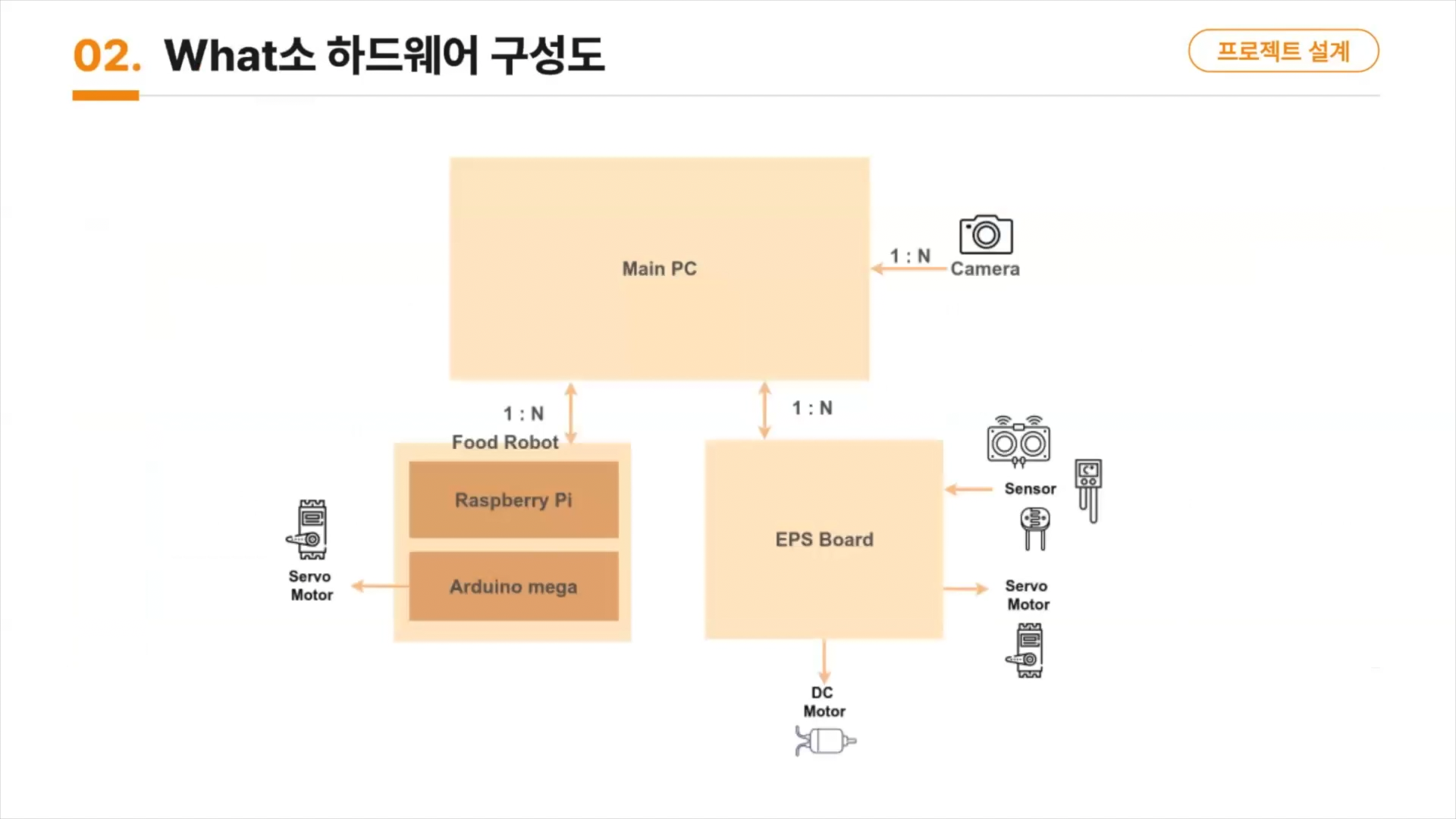
ESP 보드와 다수의 서보모터 및 메인 PC와 로봇등을 활용하여 전체 시스템을 고민했습니다.
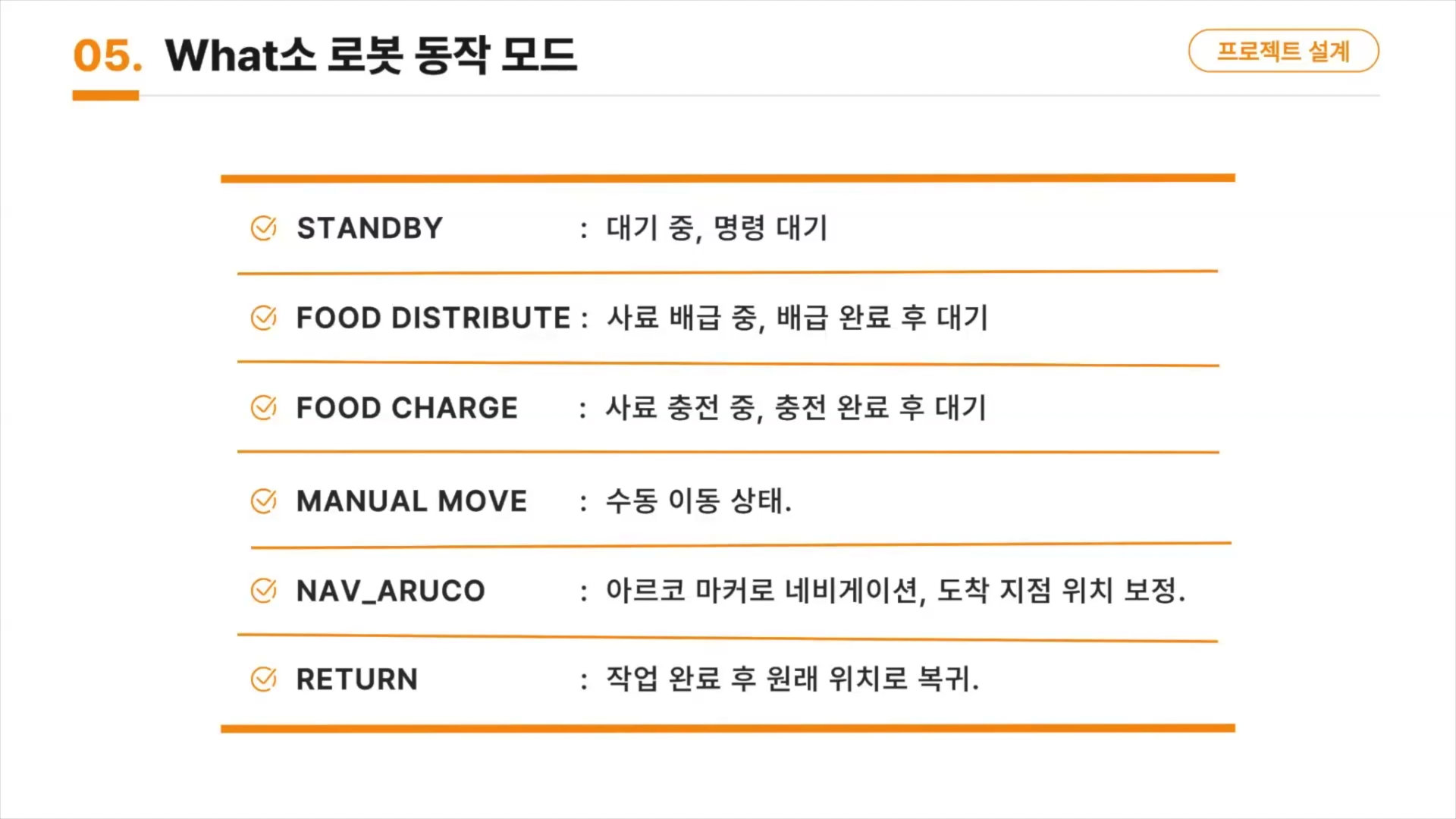
그리고 로봇과 시스템의 동작 모드를 고민하고~
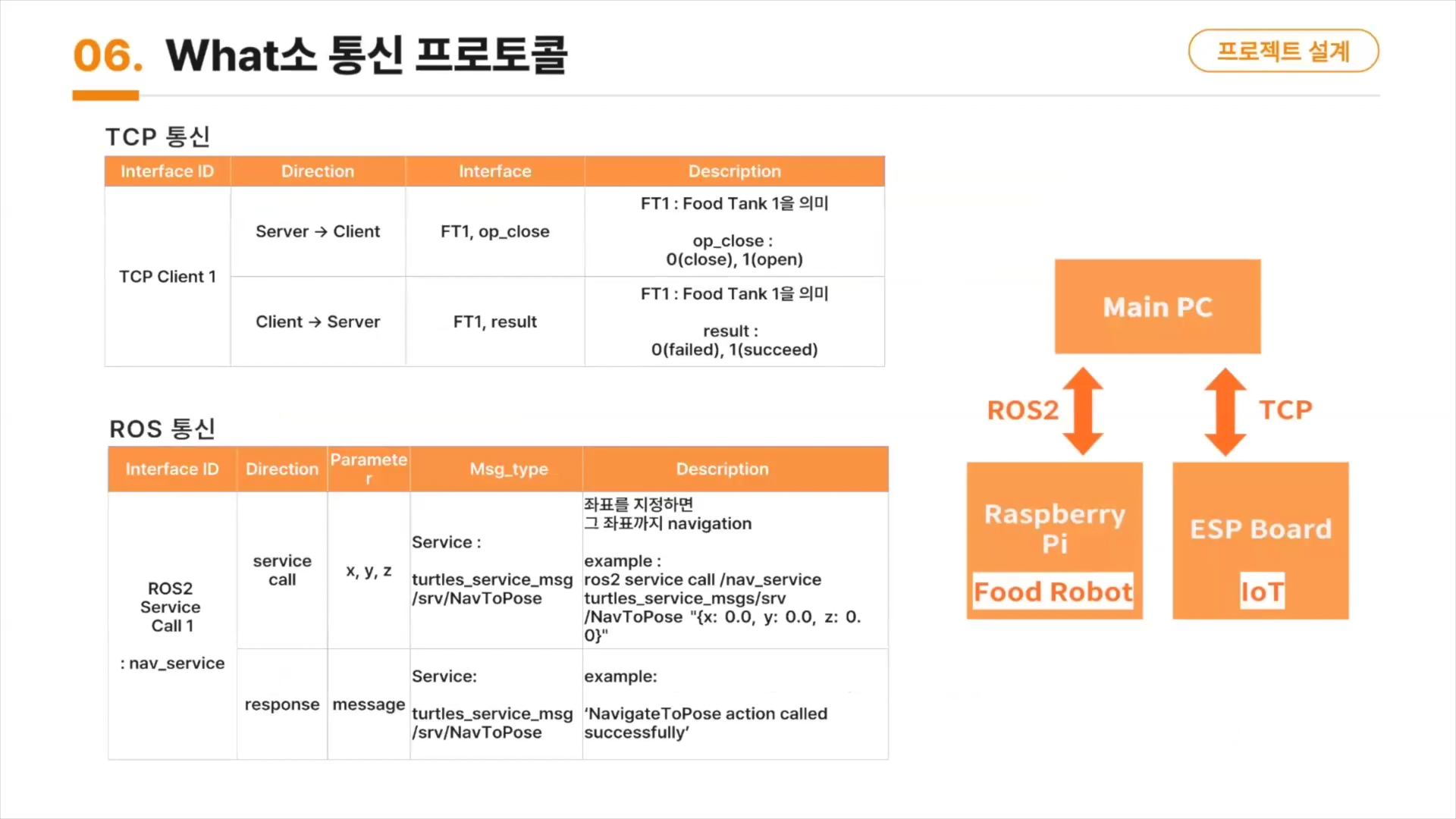
관련된 통신 프로토콜들도 고민을 합니다.
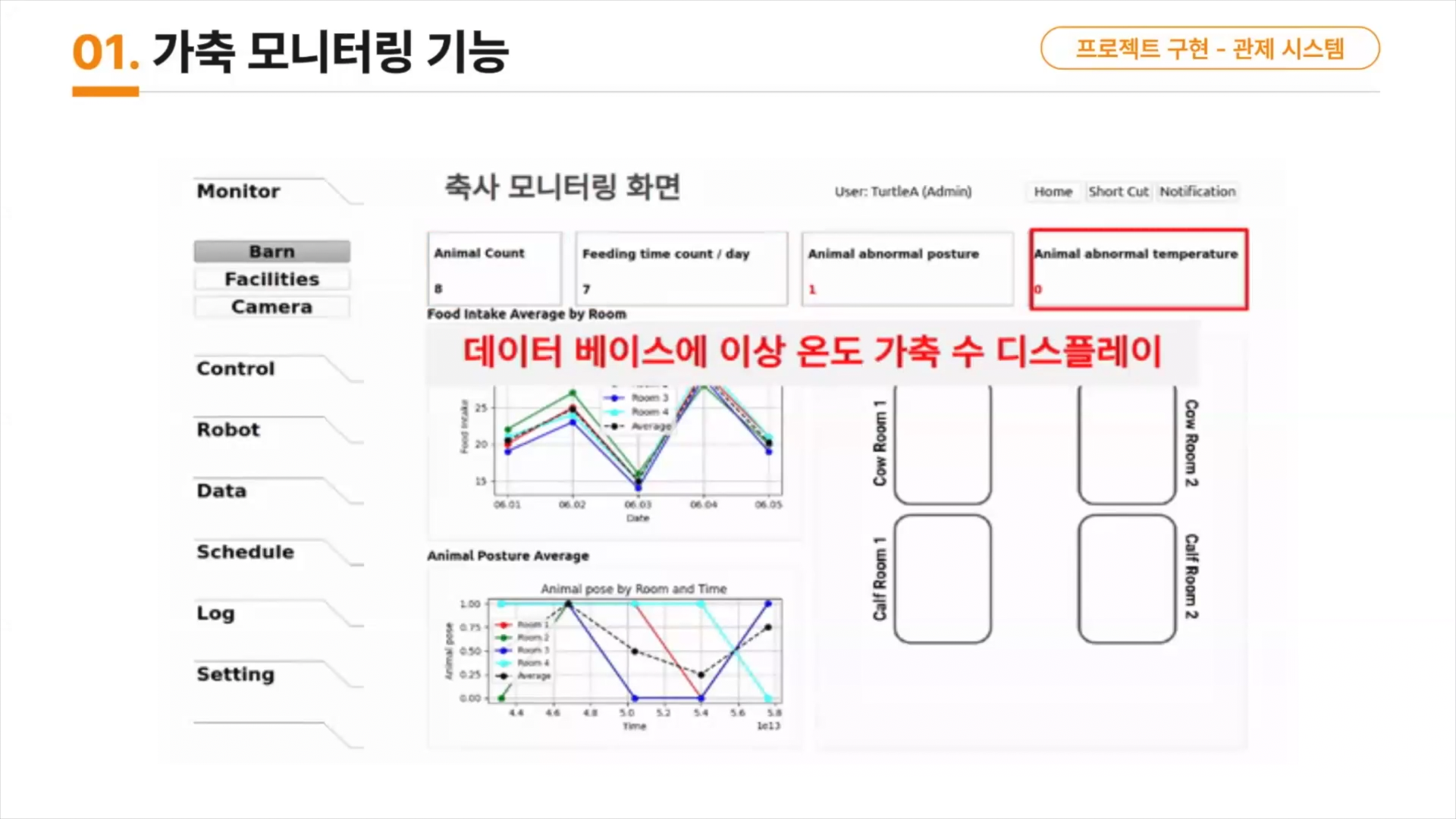
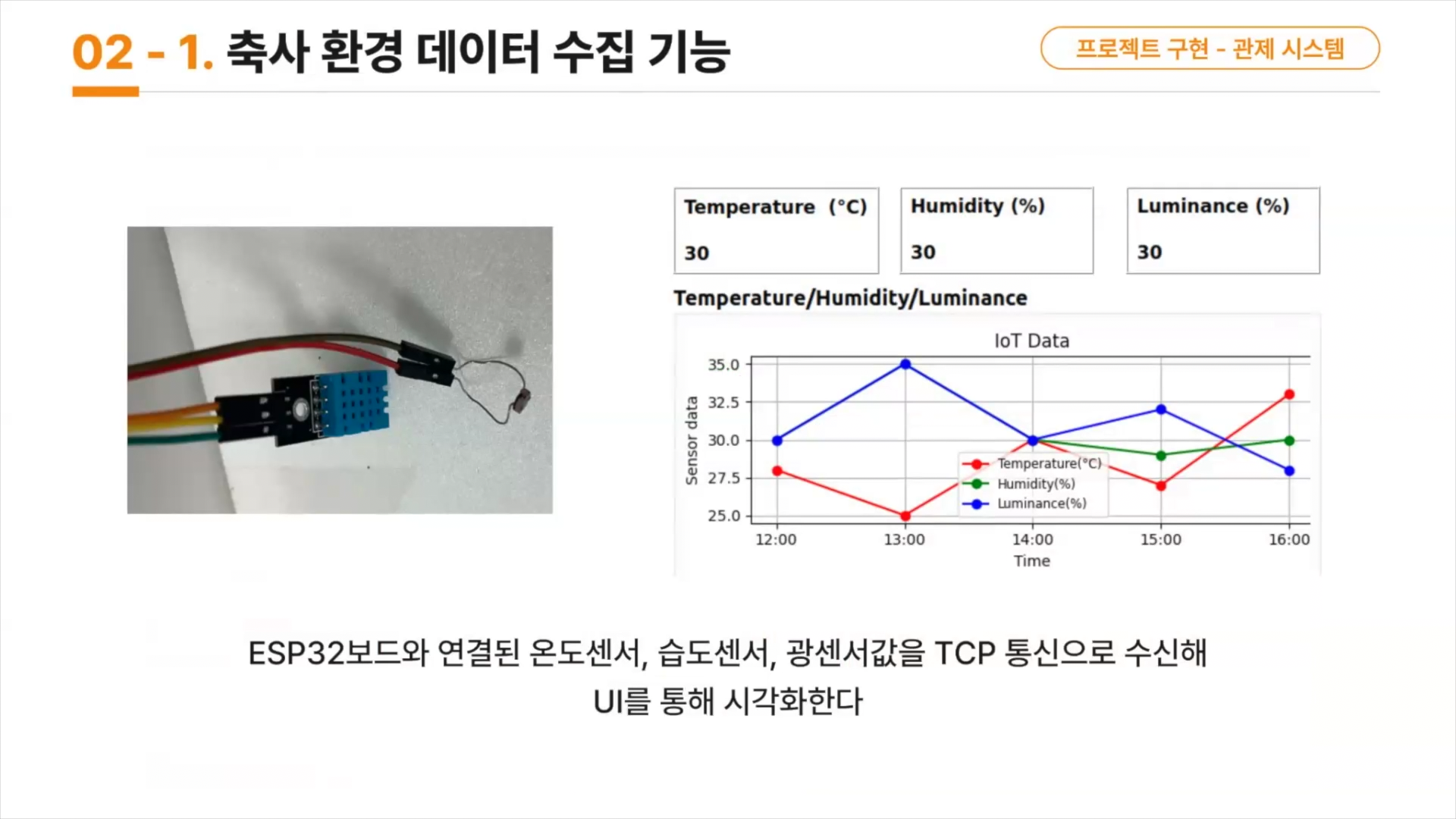
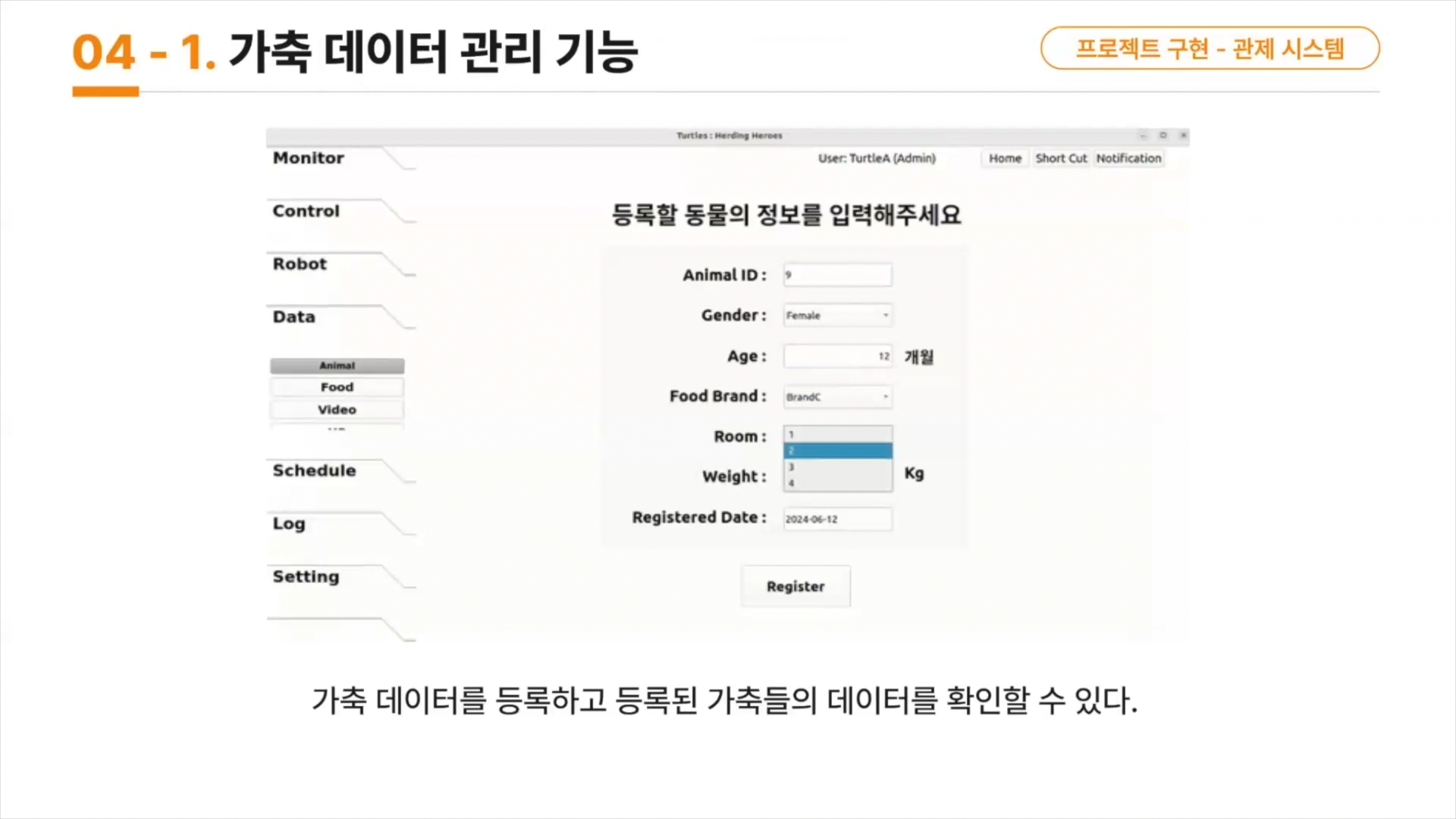
일단, 가축의 온도를 모니터링하고 이를 DB에 저장하고,
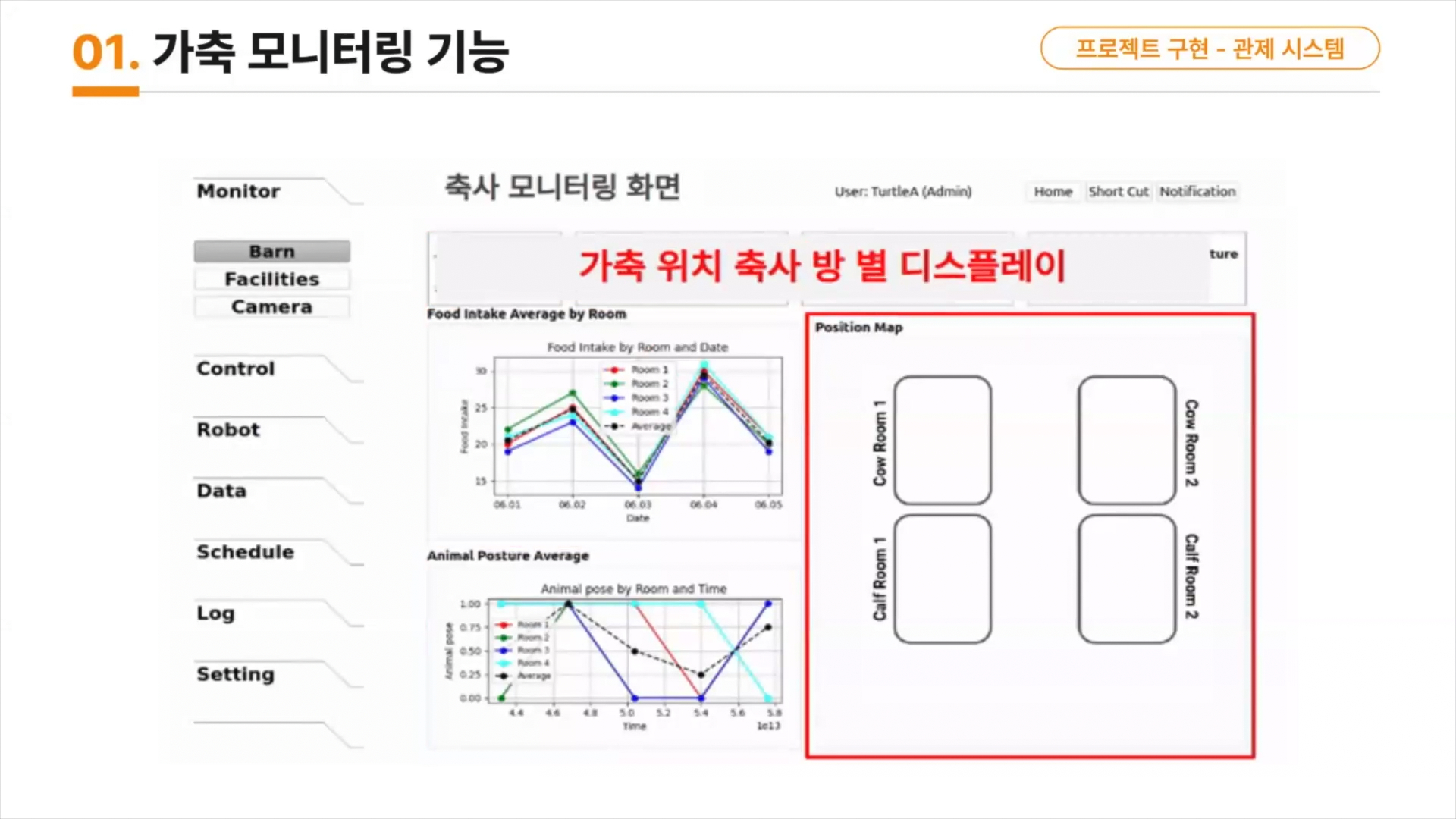
가축의 공간별 CCTV를 모니터링하는 기능,
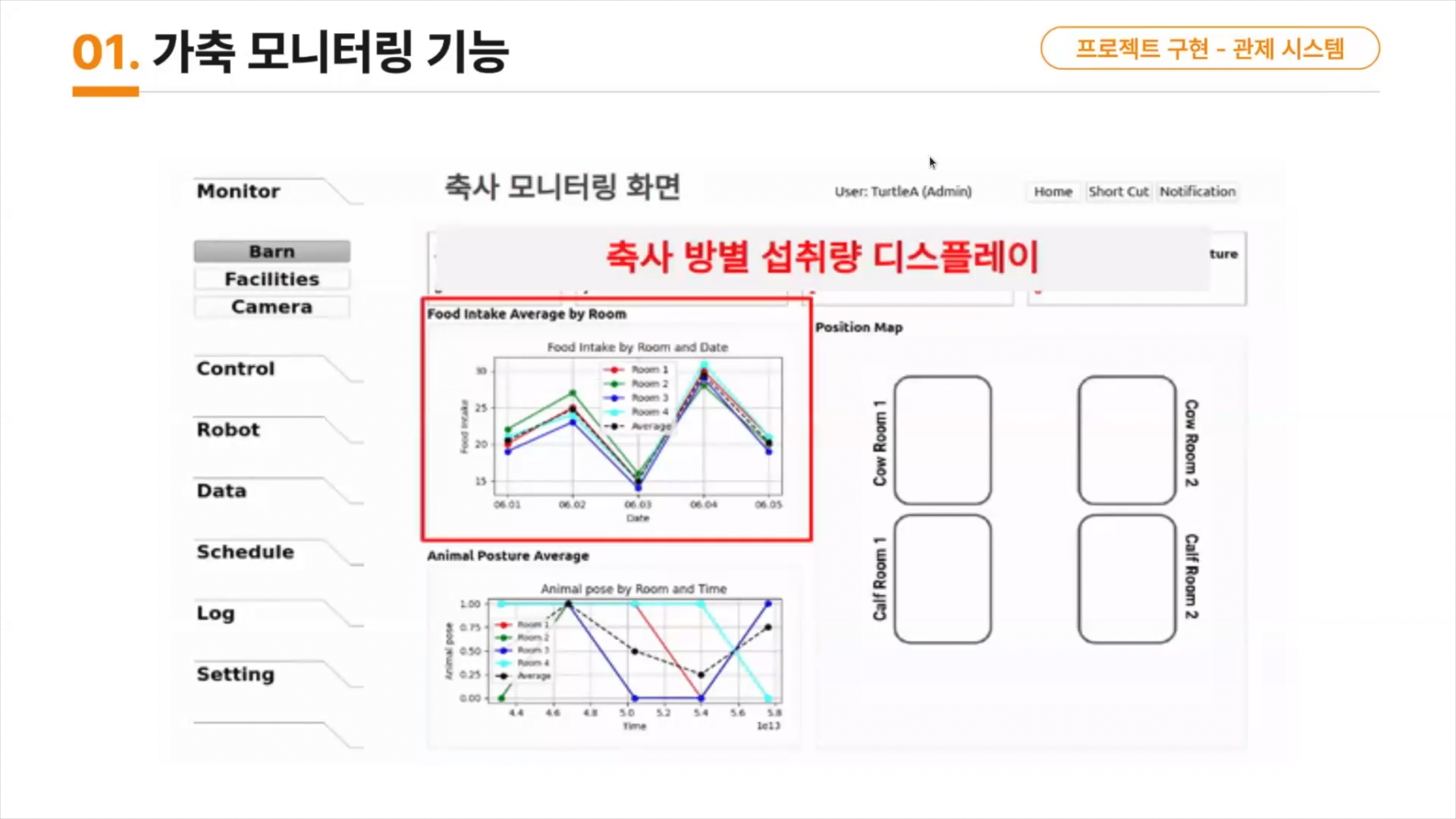
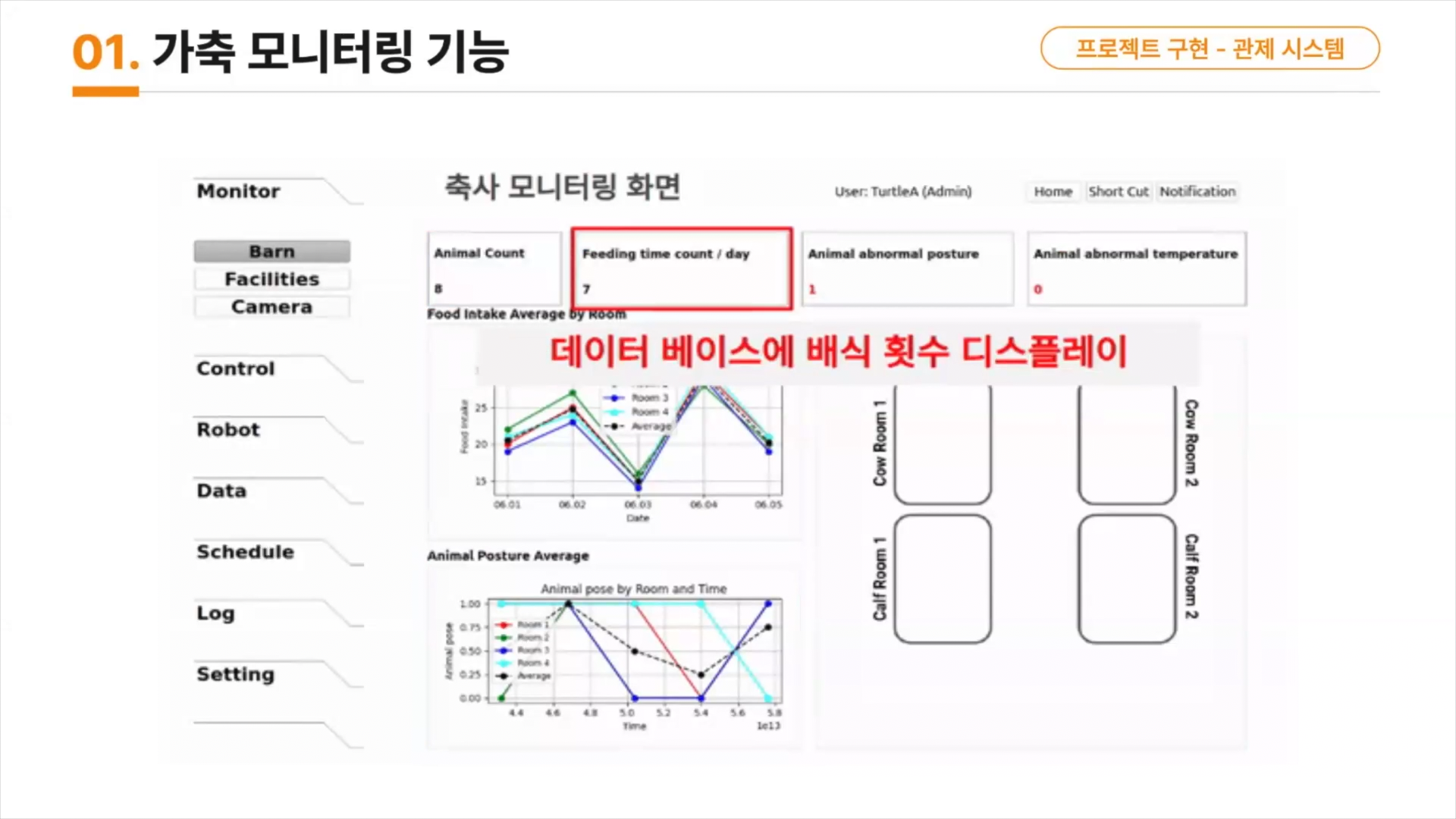
먹이 섭취량 모니터링도 넣어 두었습니다.
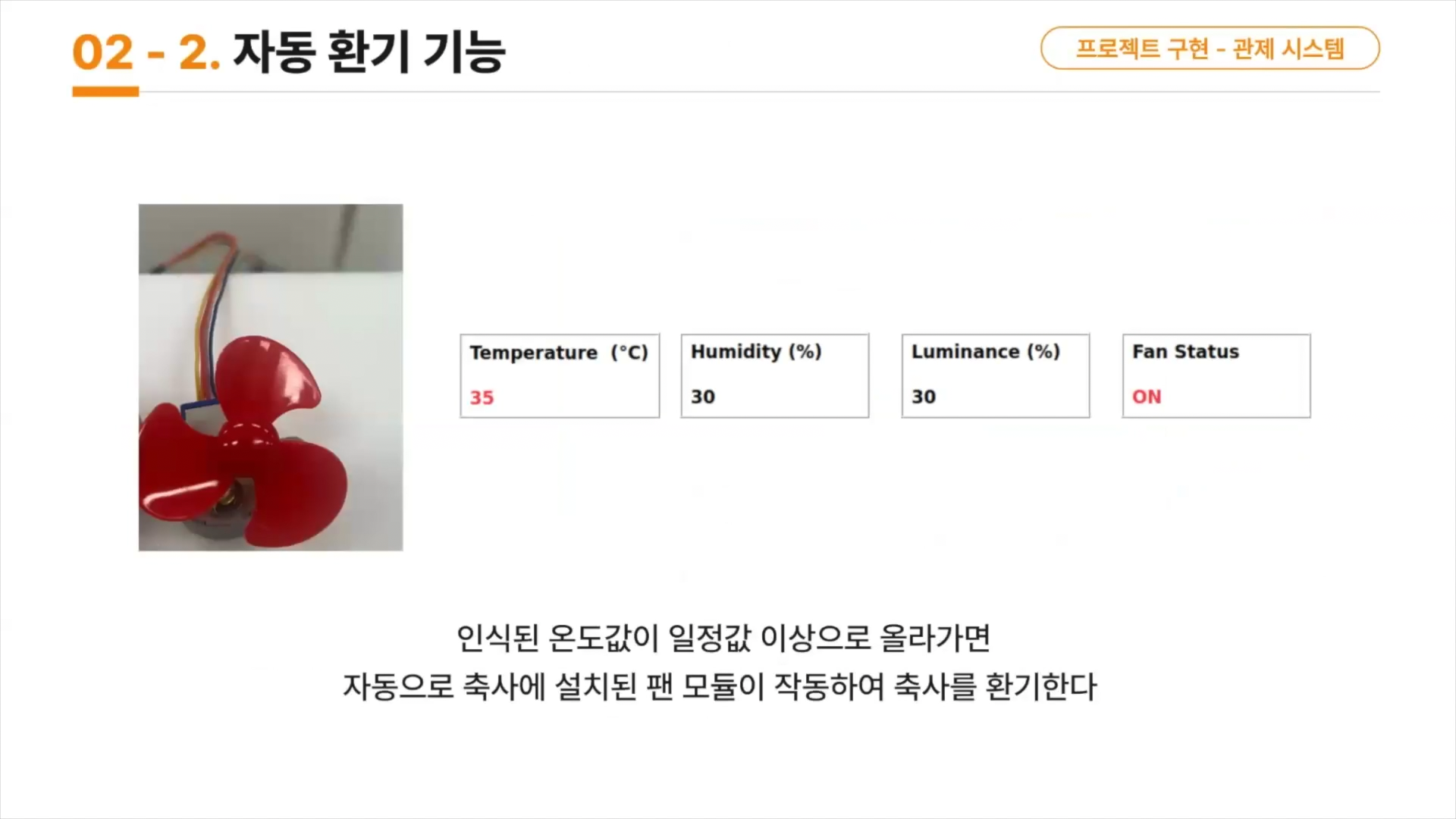
그리고 자동 환기 기능도 구현하고,
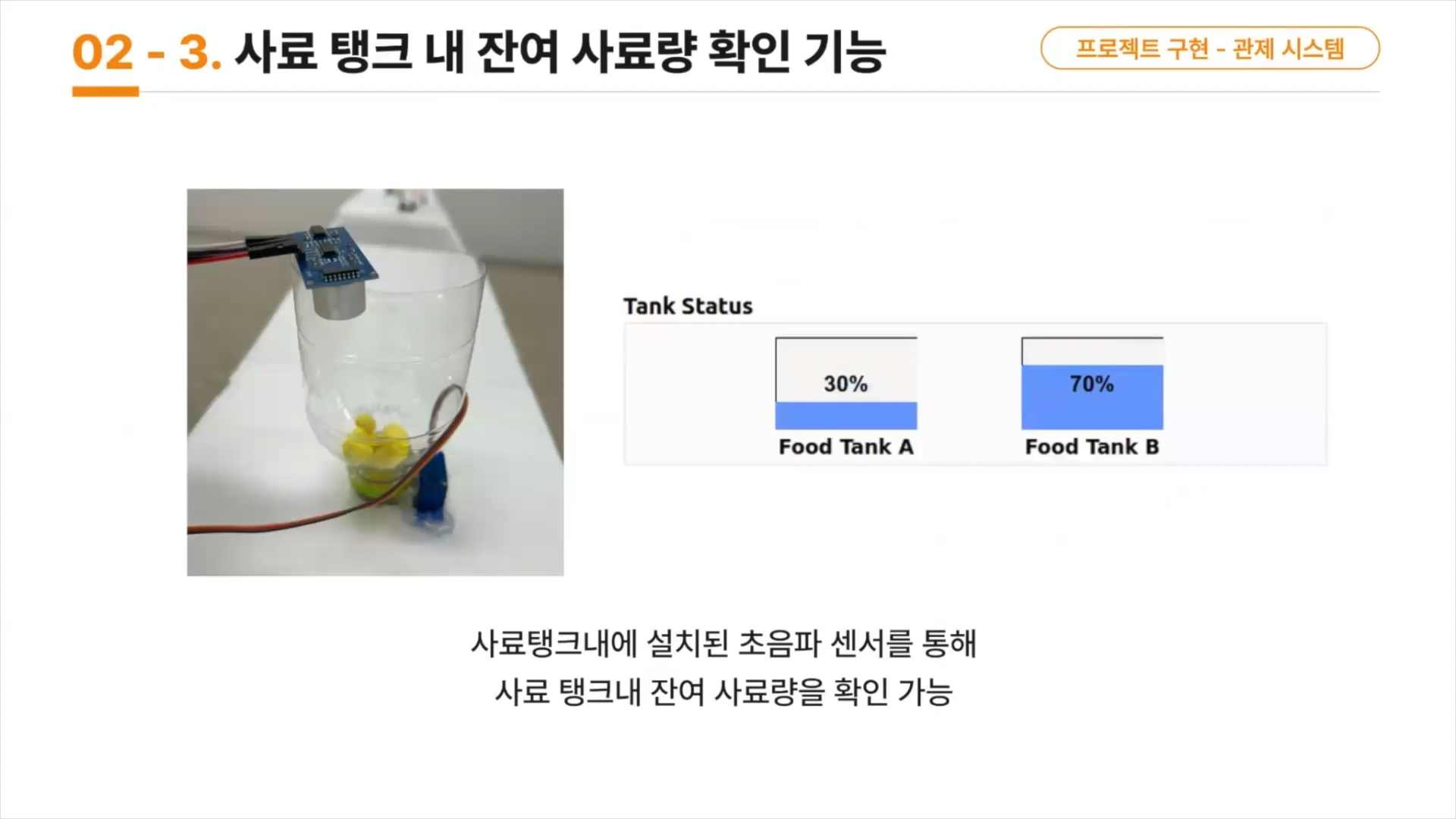
사료의 양도 자동으로 확인하도록 했습니다.
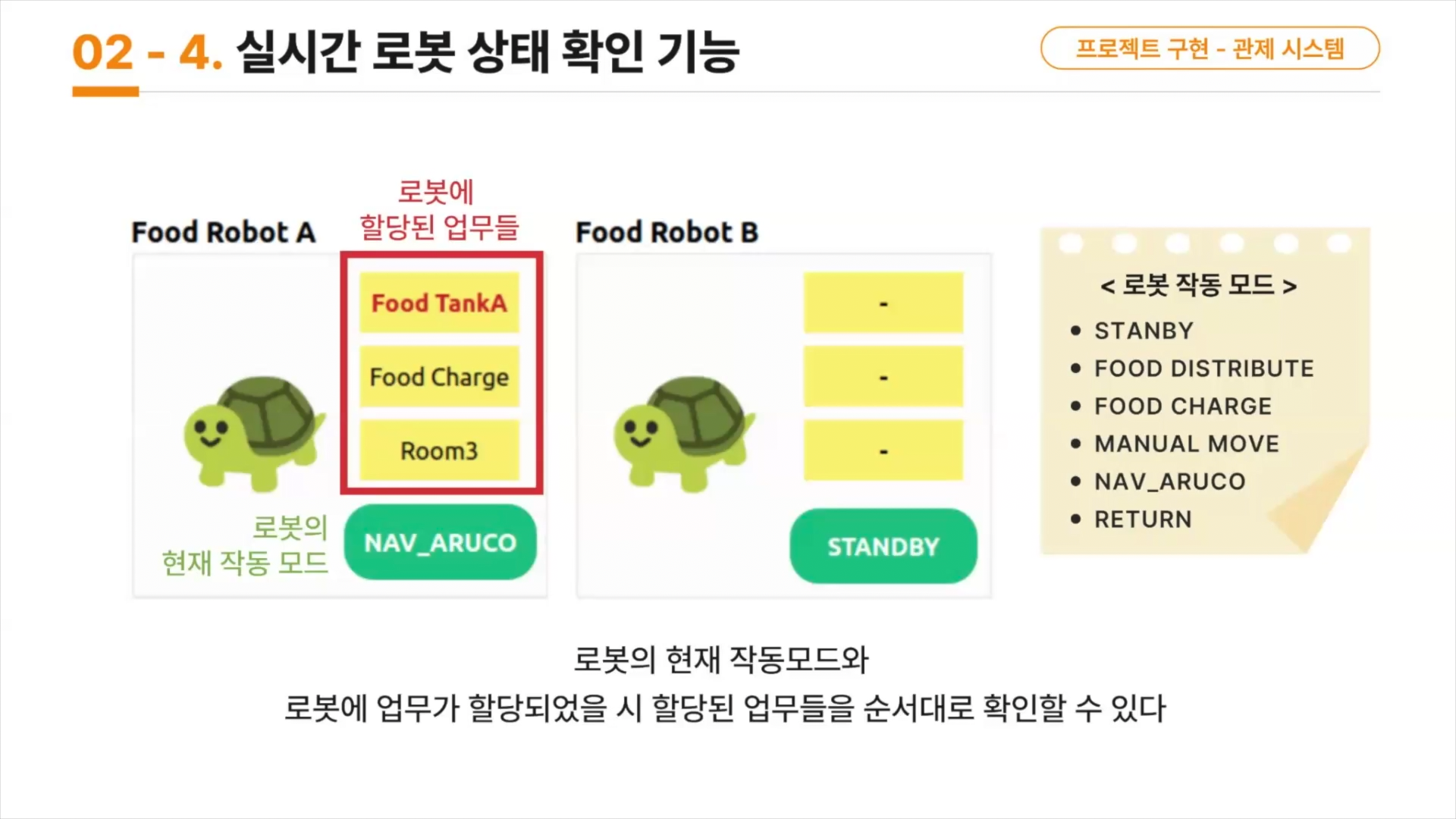
그리고 로봇의 기능과 상태를 확인하는 기능들도 추가했습니다.
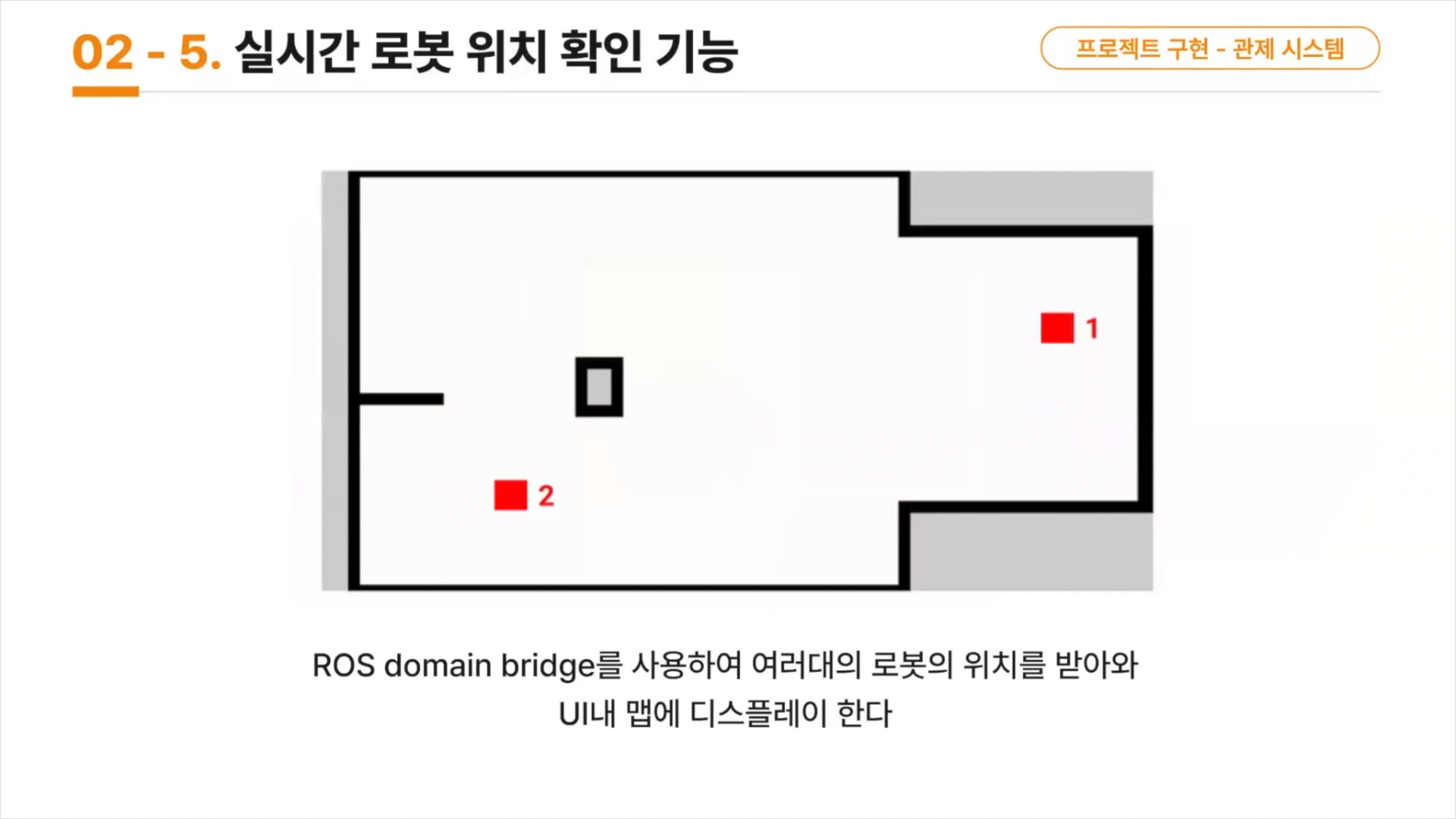
일단 로봇의 위치~ 다수의 로봇을 사용하고 있으니 ROS Domain Bridge를 사용하네요~
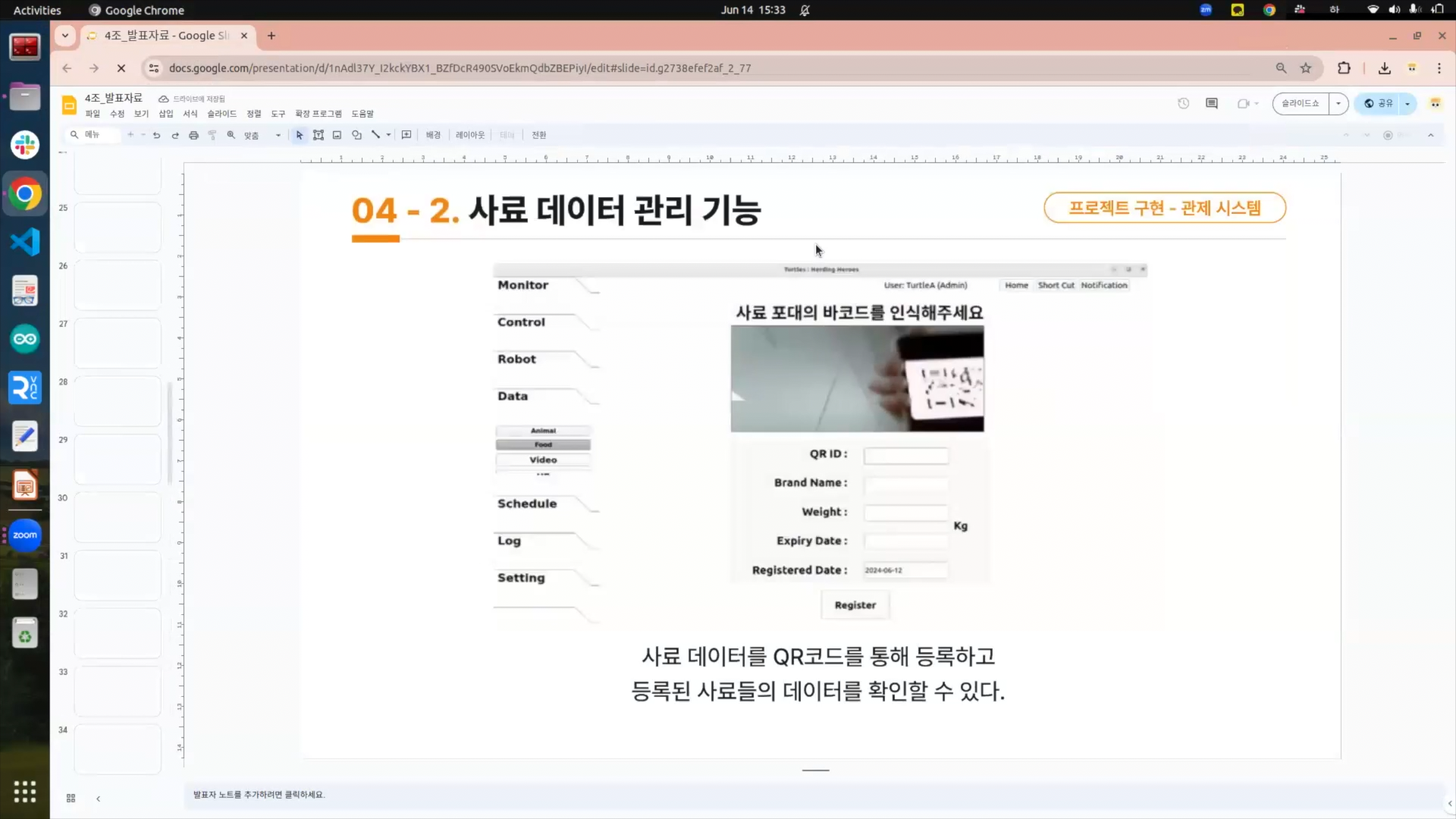
사료 데이터도 관리하구요~

지접 만든 맵입니다.^^. 로봇이 작고, 또 강의장의 규모도 한계가 있으니 저렇게 직접 구현하는 거죠~

거기에 급여통을 추가합니다.~
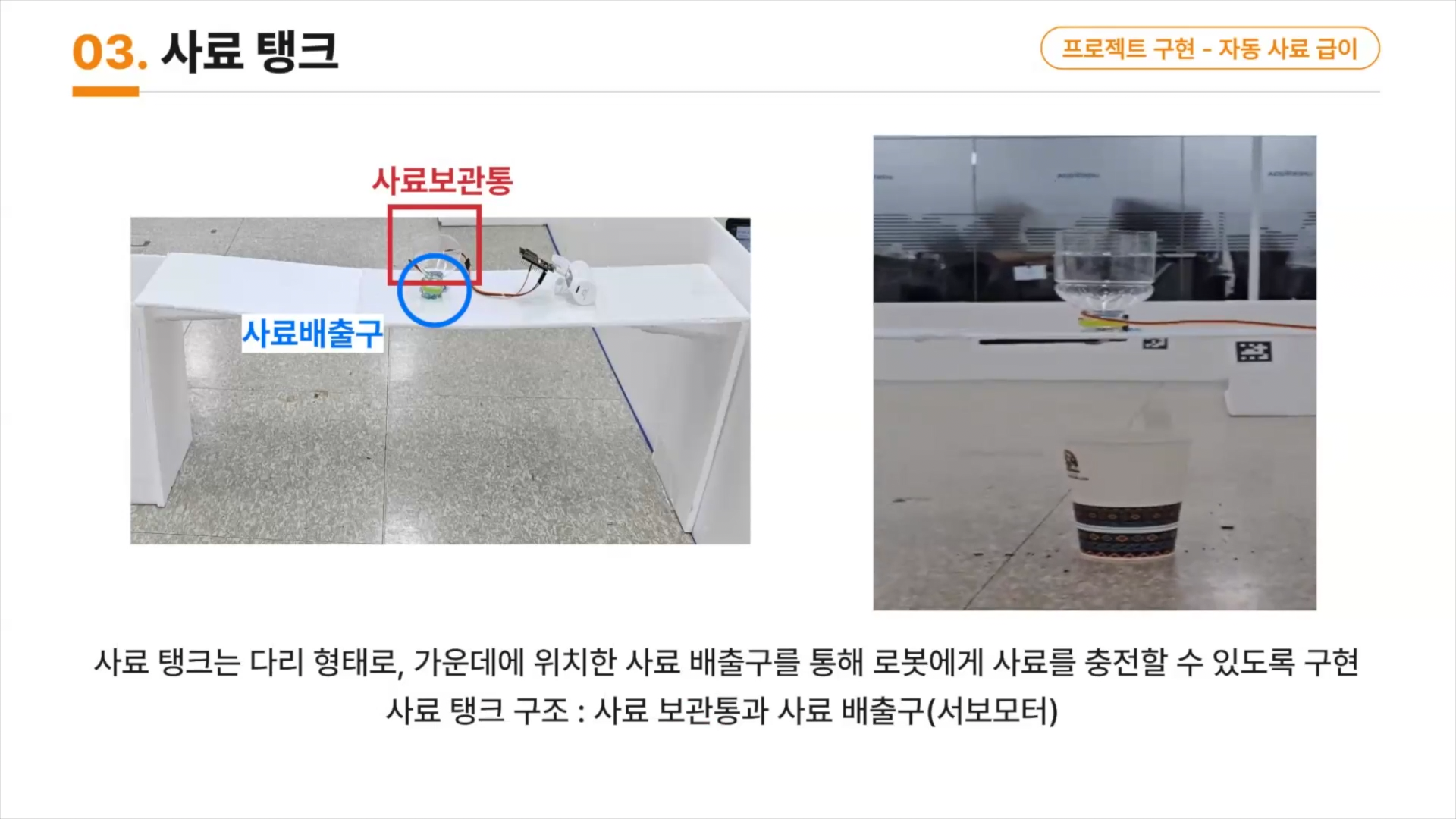
사료보관통에서 로봇으로 사료를 공급하는 장치도 직접 만들었네요^^
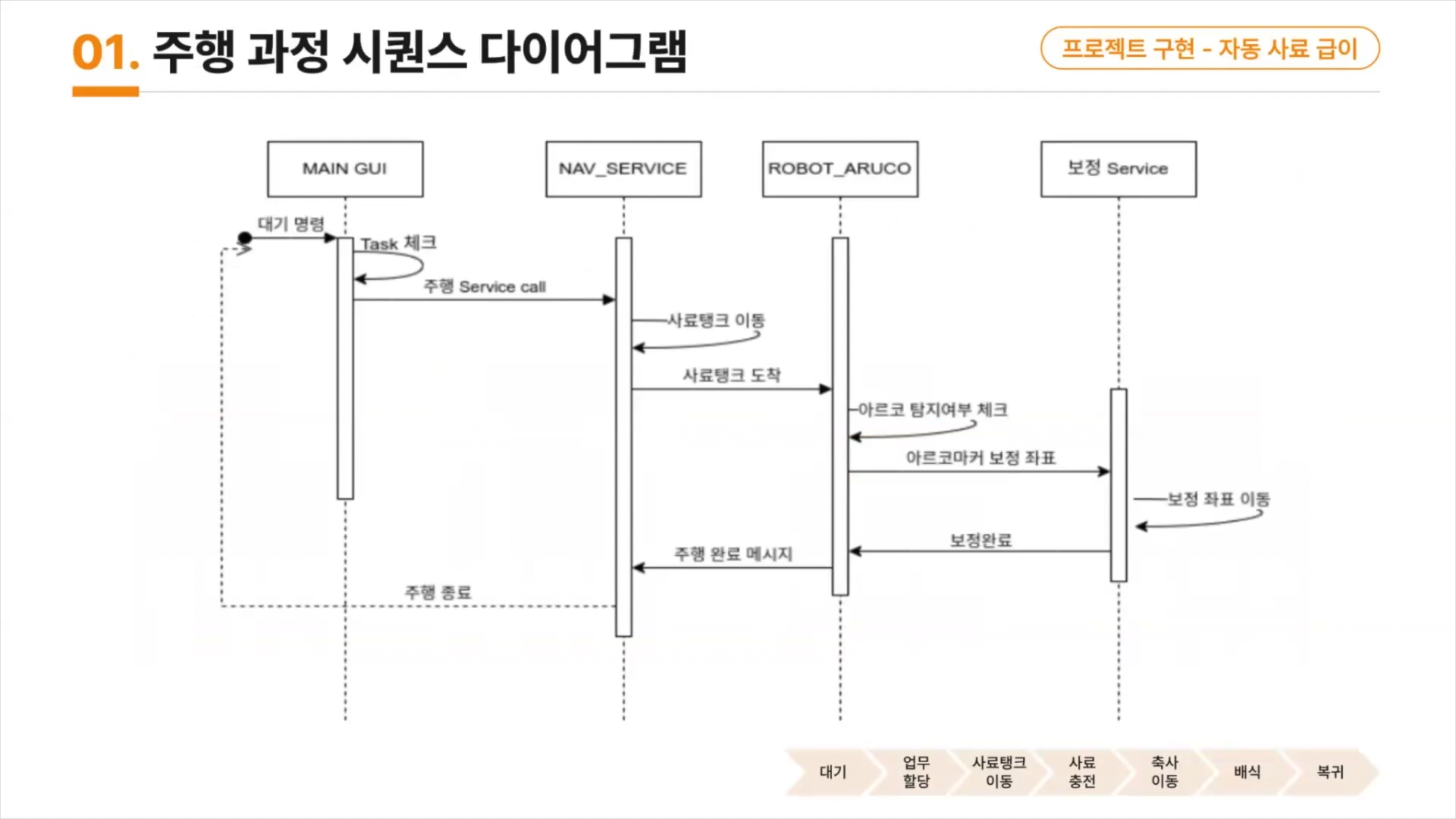
주행 과정에 대한 시퀀스 다이어그램도 작성하고 있네요^^
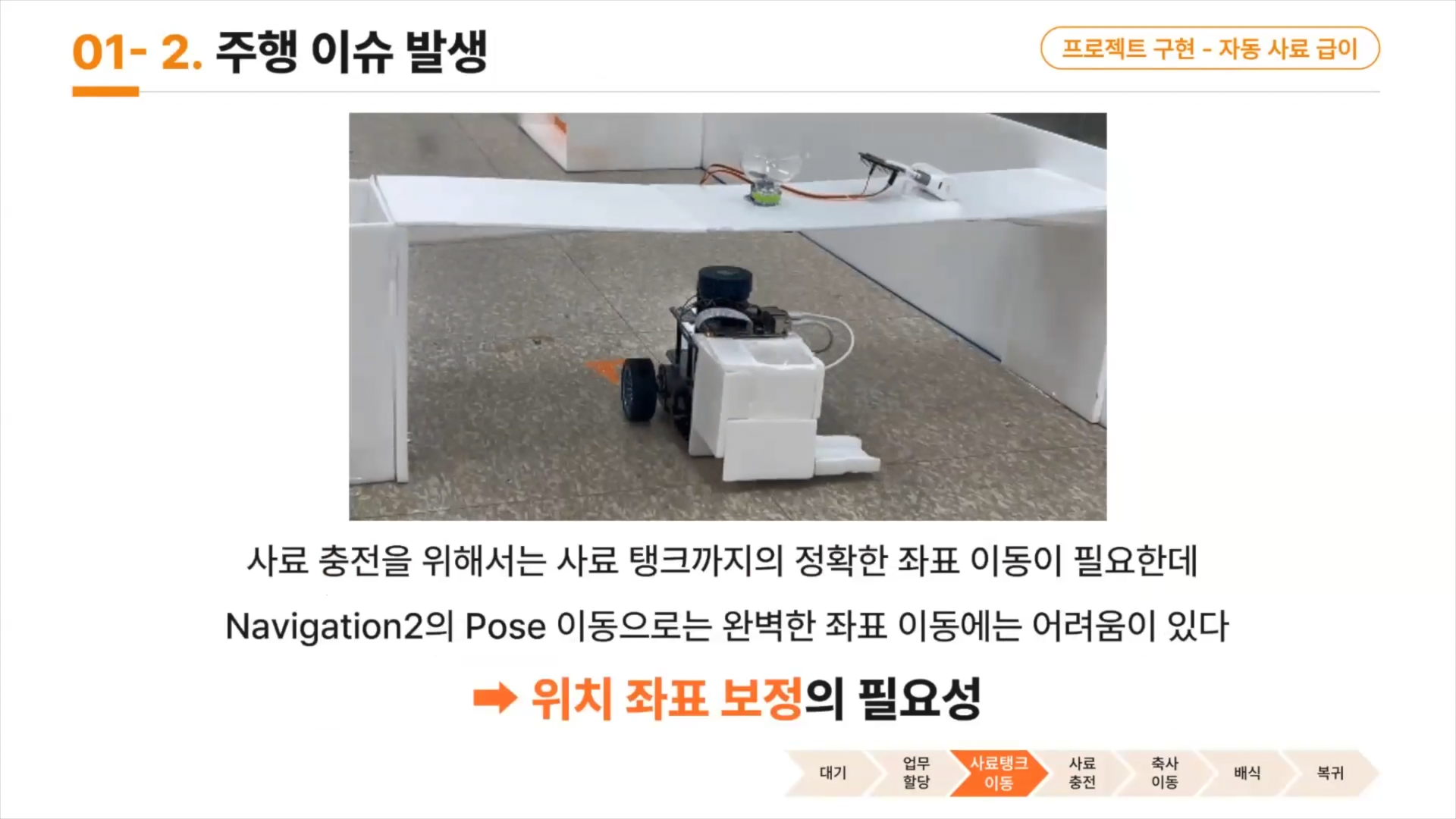
그리고 미세한 조종에 대해서도 고민들을 했습니다. 참 열심히 일을 한 팀입니다. 이 구성원들도 모두 자기들이 희망하는 직군에서 잘들 일했으면 합니다.^^ 나머지는 발표 영상을 봐주세요~