로봇 관제 OpenRMF - 핑크랩은 뭐가 다를까요?
OpenRMF를 이용한 활동을 최근 저와 제가 운영하는 PinkLAB이 많이 수행하고 있습니다. 비록 저희 PinkLAB이 2022년 5월에 창립했으니 아직 만 2년이 되지 않았고, 또 OpenRMF라는 것을 처음 시작한것도 매우 짧은 기간입니다. 그 기간 동안 저희는 놀랍게도
- 아주 큰 기관을 대상으로 관제 시스템을 RMF로 개발[2023년]하는 기염을 토했습니다.
- 그리고 그와 비슷한 시점에 관제를 주요 구성 요소로 하는 큰 국책과제를 수행하는 기관의 요청을 받아 전문가 대상 OpenRMF에 대한 교육을 수행[2024년]했습니다.
- 그리고 또 비슷한 시점에 글로벌 진출을 꿈꾸는 한 기관을 만나 그 분들의 로봇이 설치된 건물을 대상으로 관제 시스템을 OpenRMF를 적용하려 개발[2023-2024년]하고 있습니다. 여기서 저희는 폭넓은 영역을 극복하기 위해 REST API를 자체 개발하고, 그에 대응하는 안드로이드 앱 개발도 진행을 하게 되었습니다.
- 그리고 또 국내 굴지의 한 건축 관련 회사를 대상으로 OpenRMF에 대한 교육과 향후 SW개발을 위한 여러 협의를 진행중에
있습니다. 이런 저희의 활동이 제가 생각해도 갑작스럽게 진행되어서 조금 놀래는 중입니다. 이렇게 급격히 진행되는 와중에도 저희 핑크랩의 교육컨텐츠 특성을 그대로 잘 살리고 있습니다.
기술 개발의 경험 그대로 - 핑크랩의 OpenRMF 교육은 뭐가 다를까
제일 중요한 부분은 바로, 저희가 실제 로봇을 그래서 어떻게 접목할지를 이야기한다는 것입니다. 실제로봇이 가제보여도 괜찮습니다. 단순히 OpenRMF의 튜토리얼로만 진행을 하면, 그 속에 로봇은 그냥 보여지는것만 로봇일 뿐입니다. 저희는 실제 로봇의 네비게이션 패키지와 RMF를 연결하는 이야기를 합니다.

가제보이든 실제 환경이든, URDF로 잘 디파인되고 네비게이션 및 SLAM 기능을 사용하는 로봇과 연결을 먼저 하는 것의 증거는 RMF를 하더라도 map building을 해야하는 거죠. 여러분들의 다른 기관의 교육에서는 저 내용이 있는지 보세요.

그래서 저희의 교육은 ROS1, ROS2를 가리지 않고 주행로봇이 있다면, Free Fleet을 구성하는 방법을 소개합니다.
그래서 실제 로봇의 ROS2(혹은 ROS1) 패키지에 맞춰 RMF를 연결하는 방법과 그 과정을 상세히 이야기하게 됩니다.

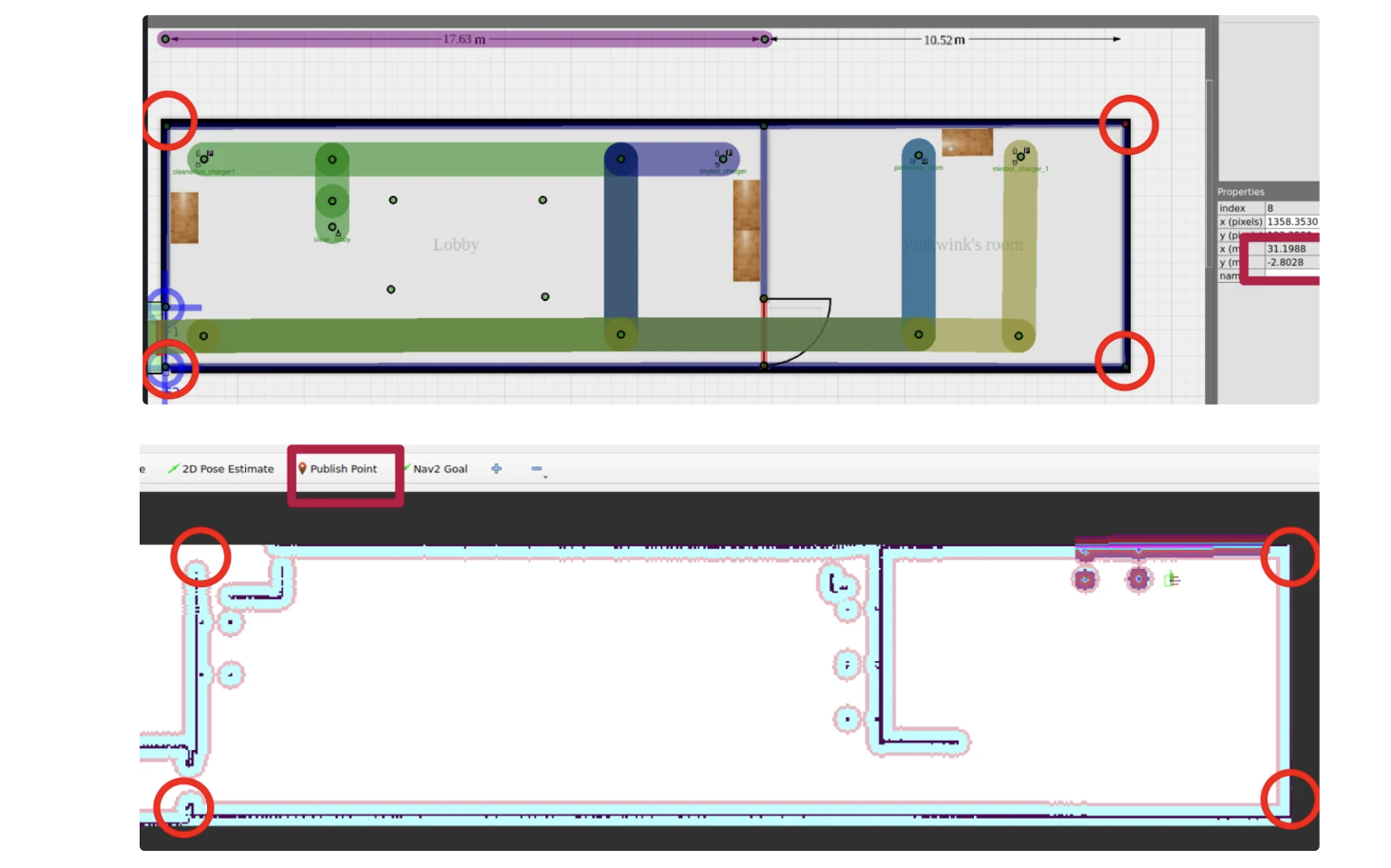
위 한장의 사진이 아마도 저희 교육의 특성을 잘 보여주는 것 같습니다. 한 번 더 관련 글도 봐주세요
핑크랩이 주행로봇 관제 시스템 OpenRMF 컨텐츠를 준비했습니다.
제가 개인적으로 간간히 SNS에 OpenRMF 이야기를 한적이 있습니다만, 최근 저희 핑크랩이 로봇 관제 시스템인 OpenRMF에 대한 교육 컨텐츠를 준비완료 했습니다. 관련해서 여러 기관분들의 교육 문의
pinkwink.kr
PinkLAB의 OpenRMF ... 바로 의뢰해 주세요
저희는 OpenRMF에 대해 교육도 기술개발도 모두 적극적입니다. 간단히 가볍게 화상회의를 해보시죠~^^
PinkLAB
핑크랩은 기술을 지향하면서, 교육과의 융합을 추구합니다.
www.pinklab.art