핑크랩이 주행로봇 관제 시스템 OpenRMF 컨텐츠를 준비했습니다.
제가 개인적으로 간간히 SNS에 OpenRMF 이야기를 한적이 있습니다만, 최근 저희 핑크랩이 로봇 관제 시스템인 OpenRMF에 대한 교육 컨텐츠를 준비완료 했습니다. 관련해서 여러 기관분들의 교육 문의와 또 개발 문의를 환영합니다.^^. 그래서 OpenRMF에 대한 소개 글을 작성해야하겠다는 생각이 들어서 이렇게 글을 하나 올립니다.

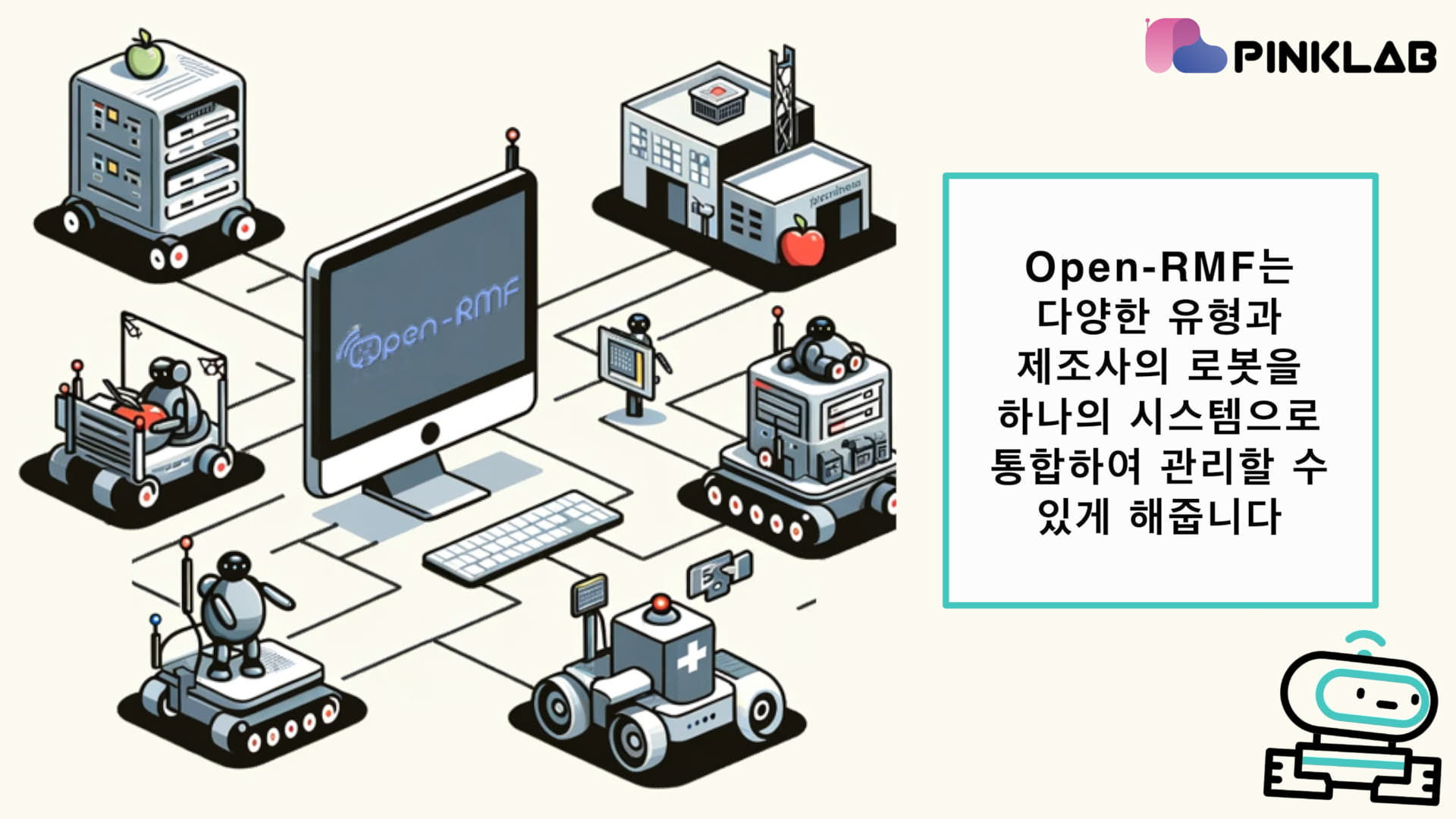
OpenRMF는 다수의 주행로봇과 그 주행로봇이 구동하는 환경을 통합하고 조율하는 도구입니다.

특히 네트워크 영역에서 힘들어하는 여러 로봇 개발자들에게 뭔가 획기적인 도움이 될것 같습니다.

OpenRMF는 다양한 유형의 제조사의 주행로봇을 하나의 시스템으로 통합하여 관리할 수 있습니다.
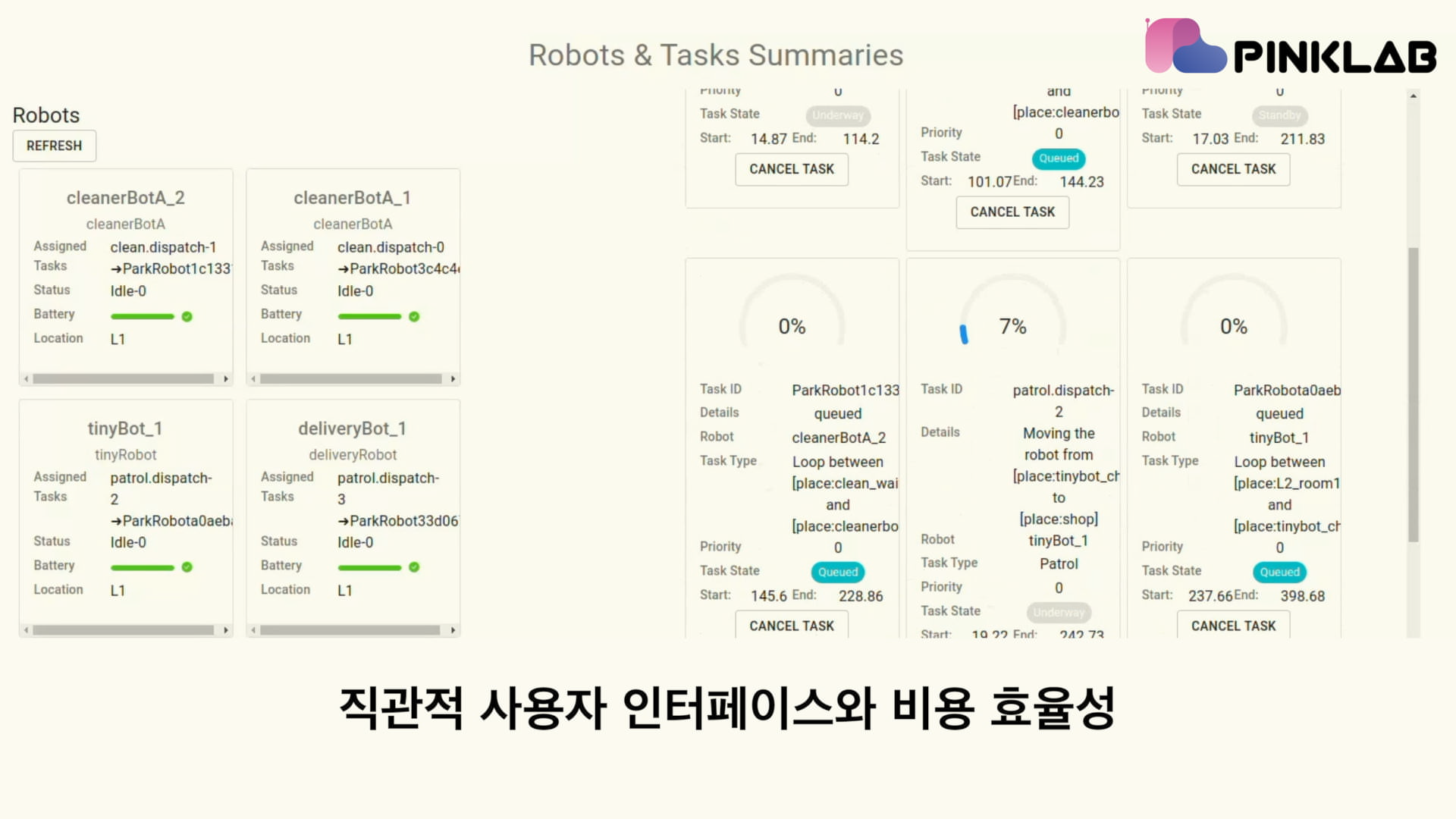
실제로 OpenRMF를 이용해보면 다수의 주행로봇의 경로관리, 자원 모니터링, 로봇 상태 모니터링 등의 면에서 높은 작업 효율을 보여준다는 것을 알 수 있습니다.

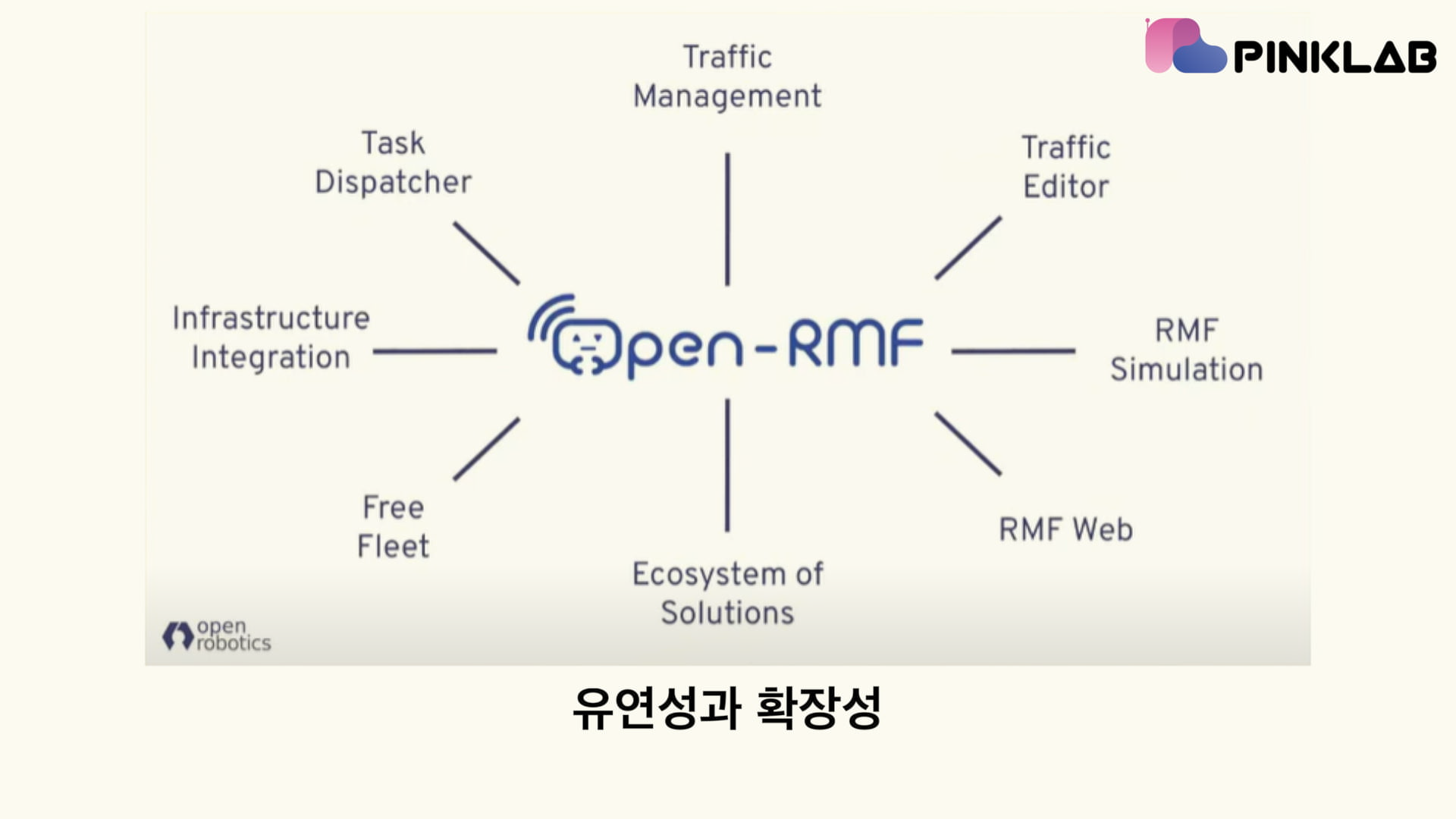
OpenRMF는 Traffic 매니저, Traffic 에디터, Task Dispatcher, RMF Web 등의 많은 기능을 제공하고 있습니다.
ROS2로 구현된 많은 주행로봇들을 쉽게 추가하고 관리할 수 있습니다.

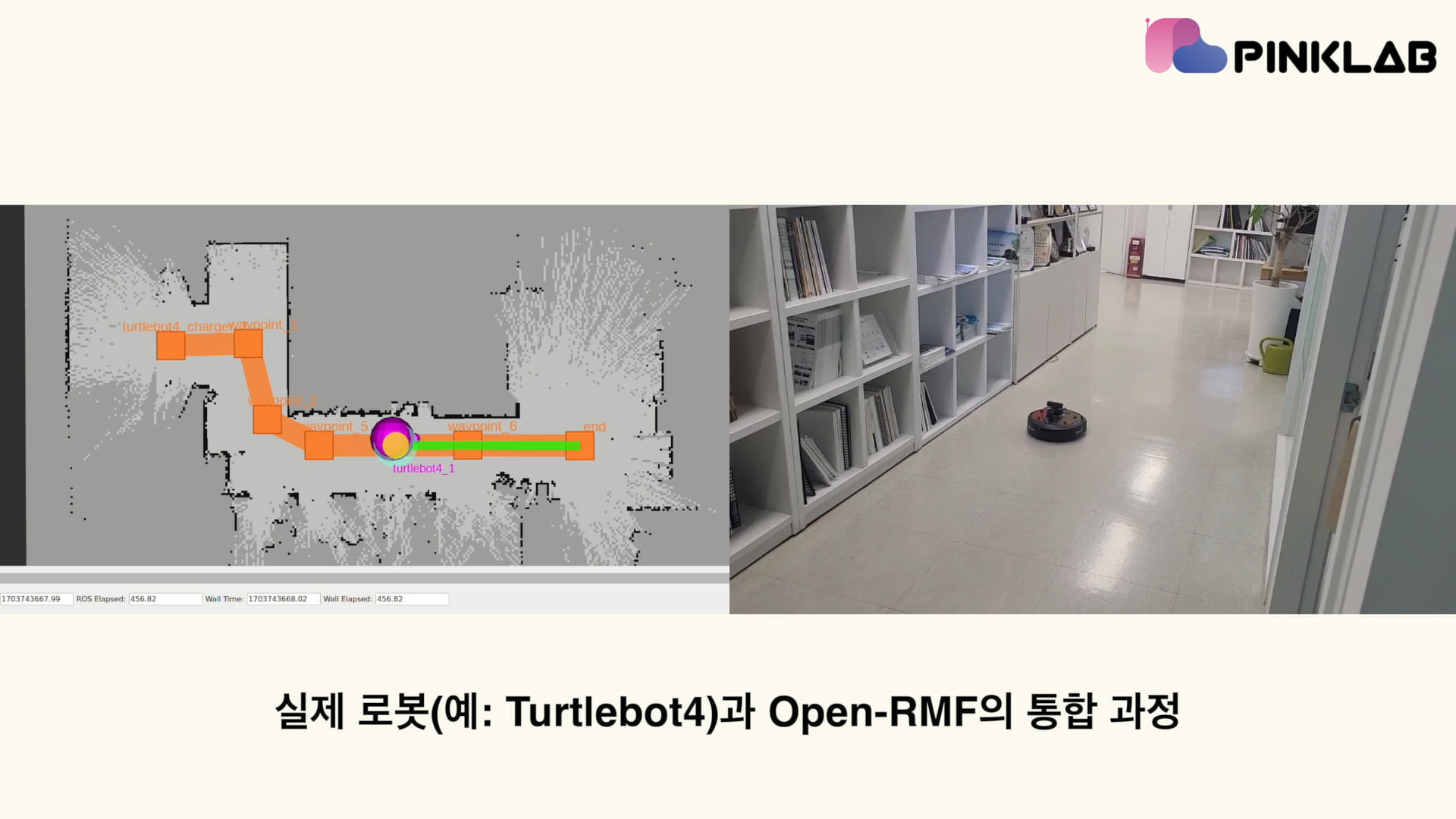
ROS2 네비게이션 패키지와 실제 로봇에 OpenRMF는 손쉽게 접목 됩니다.

특히 데시보드와 같은 긖ㅁ의 관리 도구를 제공하여 로봇 개발자가 아니어도 로봇의 상태를 확인하는데 무리가 없습니다.
특히 다양한 기능을 데모기능을 통해 손쉽게 확인할 수 있습니다.

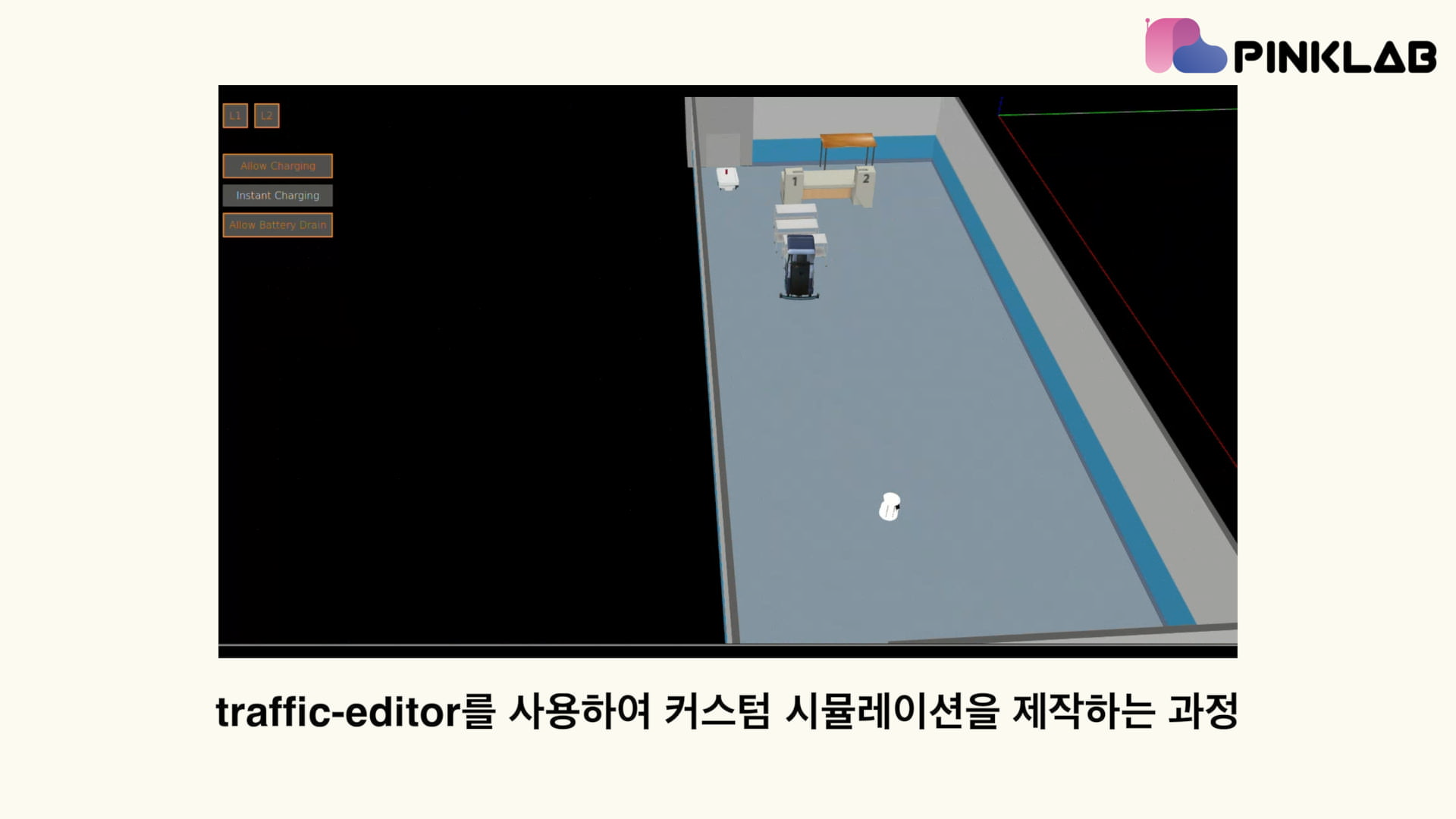
쇼핑몰, 사무실, 호텔 등의 환경을 기본 제공합니다.

커스텀 환경을 구축하는것도 쉽습니다.

터틀봇4, 3 그리고 ROS2를 이용해 만들어진 주행로봇은 대부분 통합됩니다.

또 RMF Web과 Panel 기능을 이용해서 너무나 쉽게도 모니터링을 위한 다양한 도구를 사용할 수 있습니다.

전체적인 부분은 아래 영상으로 한 번 자세히 보시기 바랍니다. 저희 핑크랩과 저는 OpenRMF 시뮬레이션, 실제 로봇과의 연결 등을 포함하는 교육 의뢰를 환영합니다. 더 나아가 OpenRMF를 이용한 관제 시스템 구축과 관련된 RND 개발 의뢰나 협업 또한 환영합니다.