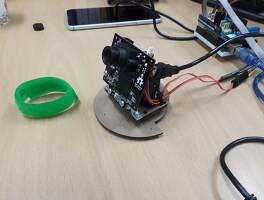
팬틸트 (3) 썸네일형 리스트형 아두이노에서 이미지 센서를 이용한 색상 트래킹 - 팬틸트 구현 Pan Tilt 2018. 7. 18. 08:00 Pixy 영상 센서 개봉기를 최근 올렸었는데요. 그 때는 그냥 Pixy 모니터링 프로그램으로 테스트를 한 번 해보았었죠. 오늘은 아두이노에서 영상 센서의 값을 받아오는 것과 팬틸트를 구현하는 것을 해볼려고 합니다.저렇게만 케이블을 연결하고서 먼저 카메라 앞에 있는 녹색을 인식시키도록 할겁니다.영상을 보면 알 수 있습니다. 버튼을 길게 눌러서 녹색등이 켜졌을때, 녹색을 가까이 가져가고, LED가 진한 녹색일때, 한 번더 버튼을 누르면 됩니다.^^ 그러면 일단 녹색 인식 교육은 끝~아두이노와 연결시켰습니다. 뭐.. Pixy 보드는 두 개의 서보모터를 연결할 수 있는 단자를 이미 가지고 있어서 바로 팬틸트 구현이 가능합니다. 그러나~ 전 뭐 제가 직접 해보고 싶었습니다.ㅋㅋㅋ예전에 구해놓은 모터 쉴드도 있어서.. ROS 가제보(Gazebo) 연습하기 - Pan/Tilt 2017. 3. 29. 08:00 렌틴 조셉의 좋은 소스코드를 만나 Pan/Tilt를 표현하는 URDF와 이를 이용해서 RViz로 시각화하는 예제[바로가기]를 따라해보았었는데요. 그 때 사용한 Pan/Tilt 예제에서 한 발짝 더 가서 Gazebo라는 아이를 이용해서 움직여보기도 할려고 합니다.^^ 뭐 언제나 그렇듯 그저그저 따라하기 수준이지요^^일단~~~ 지난번[바로가기] 예제에서 몇몇 내용을 추가하거나 바꿔서 시도해볼려구요~~일단... 폴더 config를 추가하고 거기엔 pan_tilt_control.yaml, 기존의 launch 폴더에는 gazebo_pan_tilt.launch, pan_tilt_gazebo_control.launch를 추가하고, urdf에 있는 pan_tilt.xacro는 수정할 예정입니다. 먼저... pan_ti.. ROS URDF의 기초예제 Pan/Tilt 시스템 2017. 3. 20. 08:00 우연히 검색하던중 ROS 공부에 유용한 Github 페이지를 하나 찾았습니다. ROS 로보틱스 프로그래밍이라는 책의 소스코드가 있는 곳[바로가기]인데요. 실습하기 좋은 코드가 많더라구요. 사실 예전에 ROS 3D 시삭화툴 RVIZ에 대해 기초스러운 글[바로가기]을 올렸었는데요. 그 후 너무 오랜 시간이 지나 그나마 살짝 공부하던 기초가 머리를 떠나셔서ㅠㅠ. 다시 한 번 학습을 했습니다.^^ 물론 첫 문장에서 이야기한 누군가가 올려준 학습용 예제를 따라하는 것이지만 말이죠^^팬틸트라는 시스템은 이것 저것 학습하기 참 좋은 시스템인 것 같습니다.^^아무튼~~~ 오늘은 위 그림처럼 팬틸트 이야기 해볼려구요^^먼저 catkin_create_pkg ex_urdf roscpp tf geometry_msgs urdf.. 이전 1 다음