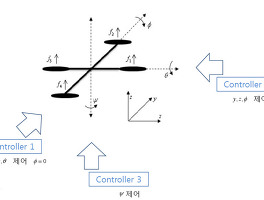
two-rotor (5) 썸네일형 리스트형 T-S 퍼지를 기본으로 한 선택적 선형화를 이용한 Two-Rotor (VTOL) 시스템 제어 2010. 4. 19. 02:05 Two-Rotor (VTOL) 시스템 ! 예전에 비행체의 수직이착륙을 동역학적으로 표현한 VTOL 시스템의 한 형태인 Two-Rotor 시스템을 소개한 적이 있습니다. [프로젝트/ControlTheory] - Two-Rotor (VTOL) 시스템의 동역학 모델 투로터 시스템은 양끝에 힘이 기체에 수직한 방향으로 인가되는 것으로 표현할 수 있는데요. 당시 이 시스템의 동역학은 로 간략히 표현할 수 있음을 이야기했습니다. 여기서 F1+F2를 u1으로 F1-F2를 u2로 두고, 또한 시뮬레이션의 편의성을 위해 -실제로 만든적이 없어 파라미터를 구할 수도 없지만,..ㅜ.ㅜ- 파라미터들을 간략히 두고나면 으로 표현할 수 있습니다. 위 동역학을 유심히 보면, u1이라는 제어입력이 x, y에 동시에 인가 되면서, 두.. T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 2009. 7. 20. 23:19 예전에 소개한 적이 있는 투로터입니다. 그때 시스템의 동역학 방정식의 결과가 위와 같았었습니다. 제어입력을 다시 치환하고, 시뮬레이션을 위해 몇몇 인자를 편하게 잡고 보면 위와 같은 형태가 됩니다. 원래 위 투로터시스템의 제어기로 궤환선형화기법을 소개한적이 있습니다. 근데 궤환선형화기법의 제어입력을 보면, 그 제어입력을 도출하기 위해 꽤 많은 요소들을 필요로합니다. 이번엔, 2009/07/07 - [쿼드콥터/Reference] - T-S Fuzzy Modeling 2009/07/20 - [공학기초/Robot] - T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 에서 소개한 T-S 퍼지 모델을 이용한 제어기의 구성을 한 번 살펴보겠습니다. 일단 y쪽에 -1이라는 상수항이 있어서 얘를 좀 어떻게 하기 .. 투로터제어기를 이용한 쿼드콥터 제어기 설계 2009. 5. 31. 05:38 이번에 보여드릴 쿼드콥터 제어기법은 음... 어느날 문득 생각나서 해봤는데 되더군요... 긴가민가하긴 했지만, 뭐 덜컹되니까 살짝 기고만장했더라는...ㅋㅋㅋ 위 그림처럼 쿼드콥터를 세개의 제어기로 제어하겠다는 이야기입니다. 일단 왜 이런 생각을 하게 되었냐면 2009/05/19 - [쿼드콥터/ControlTheory] - 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 위 글에서 설계했던 제어기는 그 제어입력을 보시면 알겠지만 너~무 제어입력이 복잡하거든요. 그래서 쿼드콥터의 동역학 방정식을 막 째려보던 (실제로는 멍~ 때리는 수준) 중에 phi를 0로 둔것과 theta를 0로 둔 결과식이 투로터와 몹시 닮았다는걸 알게된겁니다...^^ 이미 2009/05/19 - [쿼드콥터/ControlTheory] - .. 궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계 2009. 5. 19. 21:12 아래의 Two-Rotor 시스템(Two-Rotor (VTOL) 시스템의 동역학 모델)은 제어입력 u1이 x, y라는 두 개의 상태에 동시에 인가가 되면서 x, y, theta를 모두 제어하는데 어려움이 있습니다. 단적인 예로 만약 u2가 잘 동작해서 theta를 '0'으로 안정화 시키는 순간 sin(theta)가 '0'이 되어서 x를 제어하기 어려워지게 되는 겁니다. 그래서 각 상태에 들어가는 제어입력을 분리시킬 필요가 생깁니다. 그래서 위에서처럼 두 번 더 미분하게 됩니다. 여기서 theta는 시간에 관한 함수기 때문에 theta에 관해 미분할때 조심하셔야합니다. 그러면 위와 같이 x_(4), y_(4)에 인가되는 제어입력을 분리시킬 수 있게 됩니다. 이때 궤환선형과기법을 사용해서 아래의 a, b, c.. Two-Rotor (VTOL) 시스템의 동역학 모델 2009. 5. 19. 20:57 Two-Rotor 시스템은 양익 비행체의 수직이착륙 동작(Vertical Take Off and Landing)을 동역학으로 모델링 한 것을 양익의 장착각도를 0로-즉, 양 날개가 동체에 수직으로 연결되어있다고 가정한 모델입니다. 위 그림에서 F1, F2가 두 로터가 내는 양력이 되고, theta는 기울어진 각도가 됩니다. 인가되는 힘은 총 3가지로서 위에 제시된것과 같습니다. 그 힘을을 수평방향, 기울어지는 각도, 동체 중심의 운동성분으로 각기 위와 같이 정리해볼 수 있습니다. 이를 x, y, theta에 관해 정리하면 위와같은 형태를 얻게 됩니다. 일반적인 시뮬레이션이라면, 다시 몇몇 파라미터를 간단히 두고 위와같이 표현할 수 있습니다. 실제 Two-Rotor는 딱 위의 동역학에 맞는 시스템을 실제로.. 이전 1 다음