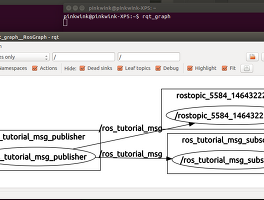
tutorial (5) 썸네일형 리스트형 Pandas 기초 명령 - 컬럼추가, 행추가, 컬럼 순서 변경 등 2018. 5. 4. 08:00 요즘 저는 매주 토요일에 Fastcampus에서 Python을 활용한 데이터분석 입문[바로가기]이라는 수업을 진행하고 있는데요. 이 수업을 진행하다보니.. 놓치는 것이 몇 가지 있는 것 같습니다. 그게 수강하시는 분들이 궁금해 하시던 것인데.. 제가 놏치고 지나가 버린 거죠ㅠㅠ. 죄송하고 안타까운 마음에 간단한 몇가지 명령을 소개합니다. 은근 필요한 것인데 또 검색에서 잘 안나타나기도 하구요^^ 그래서 이전에 했던 pandas 연재[바로가기]에 하나 추가해서 글 하나 더 작성합니다.~^^먼저 dict형으로 data를 하나 만들어서~pandas DataFrame으로 만들었습니다. 연습해야죠~^^먼저 컬럼 column의 순서를 변경하는 것입니다.혹은 index의 순서도 바꾸고 싶을 수 있죠^^아.. 컬럼을 .. ROS에서 로보티즈 다이나믹셀 움직여보기 Dynamixel Workbench 2017. 11. 6. 08:00 얼마전에 로보티즈의 다이나믹셀 중에서 XM 시리즈를 잠시 사용해보고 꽤 좋았다는 이야기[바로가기]를 했었지요. 그리고, 그 후 Python API를 제공하길래 또 그걸 가지고 잠시 즐거운 시간을 보냈지요[바로가기]. 이제 ROS에서도 살짝 구동시켜볼려고 했습니다. 뭐 여러가지 접근법이 있겠지만,제조사인 로보티즈가 배포하는 dynamixel-workbench로 시작해 볼 겁니다. 이게 GIT-HUB[바로가기]에서 받는게 최신 버전이더라구요. 이럴 경우는 ROS에서 catkin_ws의 src로 가서 git clone 하고 주소를 입력하면 copy되어 있습니다. 그리고 catkin_ws 폴더에서 catkin_make를 한 번 수행해야 합니다. 따라할 튜토리얼은ROS 공식 홈페이지의 Dynamixel workb.. ROS 3D 시각화 툴 RViz 쉽게 쉽게 처음 시작해보기 2016. 6. 16. 08:00 ROS라는 아이가 꽤 재미있다는 이야기를 드렸고... 그 후 언제나 그렇듯 기초스런 설치하기 등등을 하다가... 표윤석 박사님의 책[바로가기]을 구매하고는 좀 더 재미있는 공부를 하고 있는 중이라는 이야기를 드렸는데요.^^ 이번에는 ROS에 있는 RViz라는 3D 시각화 툴의 사용법[바로가기]을 기초스럽게 소개할까 합니다. 언제나 그렇듯~ 본 포스팅은 표박사님의 책 중 일부 내용을 그저 따라하는 아무런 수준이 없는 그런 이야기입니다.^^ cd ~/catkin_ws/src/ catkin_create_pkg testbot_description urdf cd testbot_description mkdir urdf cd urdf subl testbot.urdf 먼저 catkin_create_pkg 명령으로 패키.. ROS 메세지 - 토픽과 서비스 실습하기 2016. 6. 15. 08:00 ROS 설치하기 몹시 초보용을 실습[바로가기]한 후 또 여기 저기 자료를 뒤적거리며 따라하기 중인데요. 이번에는 좋은 자료 하나를 소개하면서 또 그걸 따라해볼까 합니다. 물론 표윤석 박사님의 책[바로가기]에도 나와 있지만, slideshare,net에 표윤석 박사님이 자신의 교재에 있는 내용보다 더 좋은 내용(^^)으로 공개하셨더라구요. 참 대단한 오픈마이드죠... ^^ 아무튼 그 slideshare에 ROS의 메세징 방법인 topic, service에 대해 다루는 기초 자료가 있습니다.[바로가기] 오늘은 저도 이 자료를 그대로 따라하려고 합니다^^.먼저 catkin_create_pkg 명령으로 std_msgs와 roscpp를 사용하는 oroca_ros_tutorials라는 이름의 패키지를 생성합니다. .. ROS를 사용할 때 자주 사용할 기초 명령 및 기능 구경하기 2016. 5. 17. 08:00 최근 저는 ROS에 대해 정~~말 간단한 설치하기를 포스팅[바로가기]했는데요. 이번에는 ROS를 들어가기 전에 사용하는 기본적일 것 같은 (사실은 모릅니다. 뭐 ROS로 엄청 대단한 일을 해봤어야 말이죠ㅠㅠ 그래서 ROS의 튜토리얼 페이지에서 보고 감으로 이야기하는 겁니다.ㅠㅠ) 명령과 기능도 소개하고, 또 기본적인 개념에 대해 적을려고 합니다. 항상, 언제나, 참 변함없이, 결국 이번에도 그저 누구나 따라할 수 있는 투토리얼을 그저 말 그대로 따라만 한 것입니다.ㅠ.ㅠ. 오늘 글의 모든 기능은 단지 ROS wiki의 투토리얼 페이지[바로가기]에 가보기만 하면 됩니다.뭐 요거 하나는 그래도 한 번 설치하고 뭐 하나를 해봤다고 익숙하네요.... roscore 라고 입력해서 ROS를 기동하죠^^ 이제 ros.. 이전 1 다음