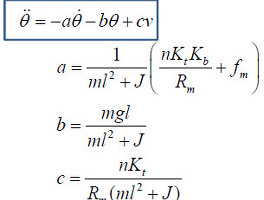
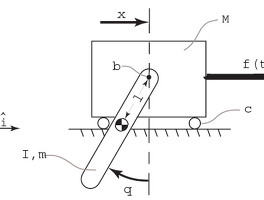
선형화 (3) 썸네일형 리스트형 [시스템 시뮬레이션 연재] 4. 시스템의 선형화 2010. 8. 12. 23:45 지난번에 랑그랑지 방법을 이용한 시스템의 동역학 모델을 만드는 것에 대해 이야기를 했었고, 그 후 비선형동역학에 대한 MATLAB 시뮬레이션에 대해 이야기를 했습니다. 이번에는 보통 많이 사용하는 LQR 제어기를 설계하기 위한 전단계로 시스템의 선형화에 대한 이야기를 하겠습니다. 어떤 방정식이 선형인지 아닌지를 판별하는 것은 Superposition이 만족해야합니다. 그와 관련된 이야기는 제가 다룬 적이 있습니다. [관련글] Simulation 1. 라그랑지 방법을 이용한 동역학 모델 구축하기 Simulation 2. DC 모터의 동역학 포함시키기 Simulation 3. MATLAB을 이용하여 시뮬레이션 구축하기 Simulation 4. 시스템의 선형화 Simulation 5. LQR 기법을 이요한 선.. Cart Pendulum의 동역학 유도 2009. 11. 6. 12:53 이미 예전에 다루었던 Inverted Pendulum과 그냥 Pendulum은 같은 기구 구성을 가지고, 그래서 동역학도 거의 같습니다. 사실 비선형을 유도한다음 선형화 동작구간만 달리해주면 선형방정식은 그냥 만들어 집니다. 이전에 Inverted Pendulum을 다루면서 동역학 유도부분이 좀 약하지 않았나 하는 생각에 Cart형 Pendulum의 동역학 유도를 다뤄보겠습니다. Cart Pendulum (카트형 역진자) 개요 ! 위와 같은 카트형 펜들럼을 보겠습니다. 카트와 바닥사이의 마찰과 진자의 고정축사이의 마찰까지 고려되어있습니다. 이번엔 라그랑지방법으로 동역학을 유도해 보기로 하죠. 그럴려면 시스템의 운동에너지와 위치에너지를 고려해 주어야합니다. 시스템의 운동에너지와 위치에너지 ! 카트는 수직방.. Balancing Robot 밸런싱 로봇 2009. 4. 18. 20:59 본 내용은 현재 너무 오래되고 포스팅의 내용이 자세하지 않아 다시 포스팅을 했습니다. 연재를 수행했지만, 최종글인 http://pinkwink.kr/344 을 읽으시면서 링크를 따라가시면 됩니다. 2005년인가 2006년에 일인승 스쿠터로 많은 사람들의 관심을 끌었던 Segway라는 제품(회사?)가 있었습니다. 얼마전에 읽은 블로그에서는 이제 2인승도 나올거라고 하더군요. 여하튼 당시 그 모델을 보고 제어나 전자를 전공한 학생들이 한번쯤 만들어 보고 싶어 했었거든요. 우리 실험실도 그래서 당시(2007년) 학부논문조와 함께 작업을 했었습니다. I. 시작하기 전에 밸런싱로봇은 그 구동방법이나 원리등이 역진자 시스템과 아주 흠사합니다. 뭐 딱 봐도 카트형 펜들럼이죠. 일단, 실제 제작전에 카티아(Catia).. 이전 1 다음