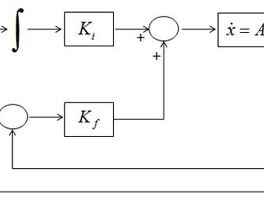
서보제어 (3) 썸네일형 리스트형 무인 탑승형 로봇. 개발 중. 조향장치 서보 제어 2012. 3. 8. 14:59 요즘 정말 무지무지 바쁘네요.^^ 최근 저희 연구소에서는 무인 전기자동차 - 탑승형로봇을 개발하고 있다고 말씀드렸었는데요. [관련글] 당시에는 그냥 자동차가 손으로 운전해서 돌아다니고 있었구요^^ 무인화시키기 위해 핸들에 조향모터를 부착해서 바퀴의 각도를 서보제어하는 걸 수행했습니다. 일단, 제자리 회전인데다, 어떤 기나긴 사연으로 인해 엔코더의 분해능을 확보할 수 없었던 것도 있고 해서, 오차범위는 1~2도 정도입니다. 그 예뻤던 본넷을 열고 열심히 테스트 중입니다. 제가요??? 아니요. 전 사진찍고 동영상 찍고 있었죠... 저희 연구원들이 무진장 애쓰고 있습니다.^^ 일단 실내 부분도 완전 뜯어진 상태입니다. 이 상태에서 제어보드를 이식하고, 테스트를 하는 거죠. 저희 연구소는 예전에 DC모터를 이용.. DC 모터의 모션(서보)제어 (Servo Control - Motion Control) 2011. 7. 6. 07:46 블로그를 통해 몇 번 밝혔지만, 저의 전공이 제어(control)입니다. 그래서 비록 작은 수의 글이지만 제어와 관련된 포스팅도 했었고, 연재도 수행했었는데요. 그런데 창피하게도 한 번도 모터 제어 자체를 수행했던 경험이 없습니다. 왜그랬을까요?^^ 아마 이때까지의 불안정한(unstable) 시스템의 로봇 [프로젝트/Robot] - Cart type Inverted Pendulum (카트형 역진자) 시스템 [프로젝트/Robot] - Rotary type Inverted Pendulum (로터리 역진자) 시스템 [프로젝트/Robot] - [밸런싱 로봇 만들기] 작은 로봇을 하나 완성해서 큰 기쁨을 얻다 들을 다루면서 저는 항상 구동체(모터)의 동역학적 특성을 시스템 전체 동역학에 대입하여 사용했기 때문입니.. 서보제어 Servo Control 2011. 3. 14. 09:00 이 글은 Yorihisa Yamamoto의 29.Feb.2009에 MATLAB Central에 발표된[관련글] NXTway-GS Model-Based Design Control of self-balancing two-wheeled robot built with LEGO Mindstorms NXT 라는 글의 Appendix A.3절. Servo Control의 내용을 발췌한 것입니다. 서보제어는 제어대상의 위치 기준값을 잘 추적하도록 디자인된 제어기법입니다. 그중 PID방식의 서보제어기법을 소개할려고 합니다. 위의 그림에 서보제어기법이 블록선도로 나타나 있습니다. K_f는 일반적인 제어기이고 서보제어를 위해 K_i가 추가된 것입니다. 위 블록선도가 어떻게 나타나게 되었는지를 보겠습니다. 먼저 위와 같은 시.. 이전 1 다음